
Все о 3D-сканерах: от разновидностей до применения
Все о 3D-сканерах: от разновидностей до применения
3D-сканер представляет собой специальное устройство, которое анализирует определённый физический объект или же пространство, чтобы получить данные о форме предмета и, по возможности, о его внешнем виде (к примеру, о цвете). Собранные данные в дальнейшем применяются для создания цифровой трехмерной модели этого объекта.
Создать 3D-сканер позволяют сразу несколько технологий, различающиеся между собой определёнными преимуществами, недостатками, а также стоимостью. К тому же, существуют некоторые ограничения по объектам, которые могут быть оцифрованы. В частности, возникают трудности с блестящими, прозрачными или обладающими зеркальными поверхностями предметами.
Не стоит забывать и том, что сбор 3D-данных важен и для других применений. Так, они необходимы в индустрии развлечений для создания фильмов и видеоигр. Также эта технология востребована в промышленном дизайне, ортопедии и протезировании, реверс-инжиниринге, разработке прототипов, а также для контроля качества, осмотре и документировании культурных артефактов.
Функциональные возможности
Цель 3D-сканера в том, чтобы создать облако точек геометрических образцов на поверхности объекта. В дальнейшем эти точки могут быть экстраполированы для воссоздания формы предмета (процесс, называемый реконструкцией). Если были получены данные и о цвете, то и цвет реконструированной поверхности также можно определить.
3D-сканеры немного похожи на обычные камеры. В частности, у них есть конусообразное поле зрения, и они могут получать информацию только с тех поверхностей, которые не были затемнены. Различия между двумя этими устройствами в том, что камера передаёт только информацию о цвете поверхности, что попала в ее поле зрения, а вот 3D-сканер собирает информацию о расстояниях на поверхности, которая также пребывает в его поле зрения. Таким образом «картинка», полученная с помощью 3D-сканера, описывает расстояние до поверхности в каждой точке изображения. Это позволяет определить положение каждой точки на картинке сразу в 3 плоскостях.
В большинстве случаев одного сканирования недостаточно для создания полноценной модели предмета. Таких операций потребуется несколько. Как правило, приличное множество сканирований с разных направлений понадобится для того, чтобы получить информацию обо всех сторонах объекта. Все результаты сканирования должны быть приведены к общей системе координат – процесс, называемый привязкой изображений или выравниванием, и только после этого создаётся полная модель. Вся эта процедура от простой карты с расстояниями до полноценной модели называется 3D конвейер сканирования.
Технология
Существует несколько технологий для цифрового сканирования формы и создание
Координатно-измерительная машина с двумя фиксированными взаимно перпендикулярными измерительными руками
Контактные 3D-сканеры
Контактные 3D-сканеры исследуют (зондируют) объект непосредственно через физический контакт, пока сам предмет пребывает на прецизионной поверочной плите, отшлифованной и отполированной до определённой степени шероховатости поверхности. Если объект сканирования неровный или не может стабильно лежать на горизонтальной поверхности, то его будут удерживать специальные тиски.
Механизм сканера бывает трёх различных форм:
- Каретка с фиксированной измерительной рукой, расположенной перпендикулярно, а измерение по осям происходит, пока рука скользит вдоль каретки. Эта система оптимальна для плоских или обычных выпуклых кривых поверхностей.
- Манипулятор с фиксированными составляющими и с высокоточными угловыми датчиками. Расположение конца измерительной руки влечет за собой сложные математические вычисления, касающиеся угла вращение шарнира запястья руки, а также угла разворота каждого из соединений руки. Этот механизм идеально подходит для зондирования углублений или внутренних пространств с небольшим входным отверстием.
- Одновременное использование предыдущих двух методов. К примеру, манипулятор можно совместить с кареткой, что позволить получить 3D-данные от больших объектов, обладающих внутренними полостями или перекрывающими друг друга поверхностями.
КИМ (координатно-измерительная машина) представляет собой яркий пример контактного 3D-сканера. Они используются в основном в производстве и могут быть сверхточными. К недостаткам КИМ можно отнести необходимость непосредственного контакта с поверхностью объекта. Поэтому существует возможность изменить предмет или даже повредить его. Это весьма важно в том случае, если сканируются тонкие или ценные предметы, например, исторические артефакты. Ещё один недостаток КИМ перед другими методами сканирования – медлительность. Перемещение измерительной руки с установленным зондом может оказаться очень медленным. Самый быстрый результат работы КИМ не превышает несколько сотен герц. В то же время, оптические системы, к примеру, лазерный сканер, может работать от 10 до 500 кГц.
Ещё одним примером могут послужит ручные измерительные зонды, с помощью которых оцифровывают глиняные модели для компьютерной анимации.
Устройство Лидар используется для того, чтобы сканировать здания, скалы и т.д., что дает возможность создавать их 3D-модели. Лазерный луч Лидара может использоваться в широком диапазоне: его головка поворачивается по горизонтали, а зеркало перемещается по вертикали. Сам же лазерный луч используется для того, чтобы измерить расстояние до первого объекта, на его пути.
Бесконтактные активные сканеры
Активные сканеры используют определённые виды излучения или просто свет и сканируют объект через отражение света или прохождение излучения через объект или среду. В таких устройствах применяется свет, ультразвук или рентгеновские лучи.
Времяпролётные сканеры
Времяпролётный лазерный 3D-сканер – это активный сканер, который использует лазерный луч, чтобы исследовать объект. В основе этого типа сканера лежит времяпролётный лазерный дальномер. В свою очередь, лазерный дальномер определяет расстояние до поверхности объекта, исходя из времени пролёта лазера туда и обратно. Сам лазер используется для создания светового импульса, в то время как детектор измеряет время до того момента, пока свет не отразится. Учитывая, что скорость света (c) – величина постоянная, то зная время пролёта луча туда-обратно, можно определить расстояние, на которое переместился свет, оно будет в два раза больше расстояния между сканером и поверхностью объекта. Если (t) – это время полёта луча лазера туда-обратно, тогда расстояние будет равно (c*t\2). Точность времени пролёта лазерного луча
Лазерный дальномер определяет расстояние только одной точки в заданном направлении. Поэтому устройство сканирует все своё поле зрения по отдельным точкам за раз, меняя при этом направление сканирования. Менять направление лазерного дальномера можно либо путем вращения самого прибора, либо с помощью системы вращающихся зеркал. Зачастую используют последний метод, ведь он намного быстрее, точнее, а также легче в обращении. К примеру, времяпролётные 3D-сканеры могут измерять расстояние от 10 000 до 100 000 точек за одну секунду.
Времяпролётные девайсы также доступны в конфигурации 2D. В основном, это касается времяпролётных камер.
Триангуляционные сканеры
Принцип работы датчика лазерной триангуляции. Показано две позиции объекта.
Облако точек создаётся с помощью триангуляциии лазерной полосой.
Триангуляционные лазерные 3D-сканеры также относятся к активным сканерам, которые используют лазерный луч для того, чтобы прозондировать объект. Подобно времяпролётным 3D-сканерам триангуляционные устройства посылают на объект сканирования лазер, а отдельная камера фиксирует расположение точки, куда попал лазер. В зависимости от того, как далеко лазер продвигается по поверхности, точка появляется в различных местах поля зрения камеры. Эта технология названа триангуляцией потому, что лазерная точка, камера и сам лазерный излучатель образуют своеобразный треугольник. Известна длина одной стороны этого треугольника – расстояние между камерой и лазерным излучателем. Также известен угол лазерного излучателя. А вот угол камеры можно определить по расположению лазерной точки в поле обзора камеры. Эти 3 показателя полностью определяют форму и размер треугольника и указывают на расположение угла лазерной точки. В большинстве случаев, чтобы ускорить процесс получения данных, вместо лазерной точки пользуются лазерной полосой. Так, Национальный научно-исследовательский совет Канады был среди первых научных организаций, разработавших основы технологии триангуляционного лазерного сканирования ещё в 1978 году.
Преимущества и недостатки сканеров
Как
can-touch.ru
Программы для 3D-сканирования: обзор и применение на практике

Содержание
Вступление
Возможности современных 3D-принтеров и обрабатывающих центров с ЧПУ безграничны. Но работа над изготовлением детали всегда начинается с 3D-модели, а чтобы получить из заготовки или напечатать нужную деталь у инженеров есть два пути: разработать модель “с нуля” в программе трехмерного моделирования или воспользоваться возможностями 3D-сканирования и получить модель уже существующей вещи, чтобы затем отредактировать ее и использовать.
В этом обзоре говорим о 3D-сканировании и о том, какие устройства и программное обеспечение необходимы для получения 3D-моделей.
Назначение 3D-сканеров

Источник:3druck.com
Итак, 3D-сканеры позволяют получить трехмерную модель какого-либо предмета. Часто сканирование оказывается более удобным и быстрым способом получить модель, а иногда — и единственным из возможных. Например, не существует более надежного способа сделать модель какого-либо произведения искусства, а если вам нужен более массовый и востребованный в реальной жизни пример — 3D-сканирование применяется для автоматизации поиска дефектов и контроля размеров деталей в автомобильной и авиационной промышленности.
Интересно более повседневное применение? Приглядитесь к печати индивидуальной обуви, учитывающей все особенности строения стопы.

Источник: 3dprint.com
Виды 3D-сканеров

Источник: imakr.com
Для того, чтобы перенести пространственные характеристики какого-либо предмета в трехмерную модель можно воспользоваться одной из доступных технологий, 3D-сканеры бывают:
- Оптические
- Фотограмметрия
- Отраженный структурированный свет
- Лазерное сканирование
- Другие
- Механическое сканирование
- Ультразвуковое сканирование
У каждой из них есть свои достоинства и недостатки.
Фотограмметрия

Этот метод позволяет строить модели объектов на основе множества фотографий, сделанных под разным углом. Чем больше снимков — тем более детальной получится модель. Поскольку в данном методе основой выступает математический алгоритм, вычисляющий положение точек в пространстве через оценку их взаимного расположения, в зависимости от освещенности и глубины резкости на разных снимках, то лучших результатов удастся достигнуть на фотоаппаратах с фиксированным фокусом и при условии равного расстояния до предмета, при движении снимающего по кругу.
Этот метод хорош тем, что позволяет получать приемлемые по качеству результаты даже с помощью камеры смартфона. Описание программ для 3d сканирования смартфоном и фотоаппаратом читайте в в этом обзоре.
Отраженный структурированный свет

Фото: 3dunderworld.com
В основе второго способа лежит отраженный структурированный свет. Этот метод уже требует специального оборудования, которое построено на принципе проецирования на сканируемый объект световой сетки. Ее искажение на объекте, которое считывается специальной камерой, позволяет получить очень точное представление о его форме.

Картинка: 3dnatives.com
Кроме того, этот метод позволяет получать результаты очень быстро, ведь для получения исходной информации о поверхности достаточно всего нескольких кадров. Альтернативный вариант подразумевает использование луча с изменяемой длиной волны — в этом случае удается полностью исключить влияние существующего освещения и получить полное представление о форме сканируемого объекта.
Лазерное сканирование

Фото: Shining 3D — сканирование 3D-сканером Shining 3D X7+
Это более медленный, но в некоторых случаях более точный способ получить информацию об объекте. Он активно применяется в дефектоскопии, поскольку позволяет получать данные о наличии и структуре даже мельчайших пор, что важно при производстве высоконагруженных элементов конструкций или сложных отливок, таких как головка блока цилиндров двигателя. Существует несколько вариаций этого метода. Триангуляционные лазерные сканеры измеряют смещение отраженного луча, прошедшего через специальную линзу, а времяпролетные строят рельеф сканируемой детали на основе изменения задержки возврата отраженного лазерного импульса.
Механическое сканирование

Фото: blum-novotest.com
Процесс механического сканирования самый медленный и самый точный. Это первый из используемых методов проверки линейных размеров, который реализован в массовом производстве в виде КИМ — координатно-измерительных машин.

Картинка renishaw.ru — КИМ Revo для пятиосевых измерений.
Механическое сканирование осуществляется зондом, который буквально ощупывает деталь. Метод не пригоден для работы с мягкими, пористыми, упругими, недостаточно прочными объектами.
Ультразвуковое / акустическое 3D-сканирование
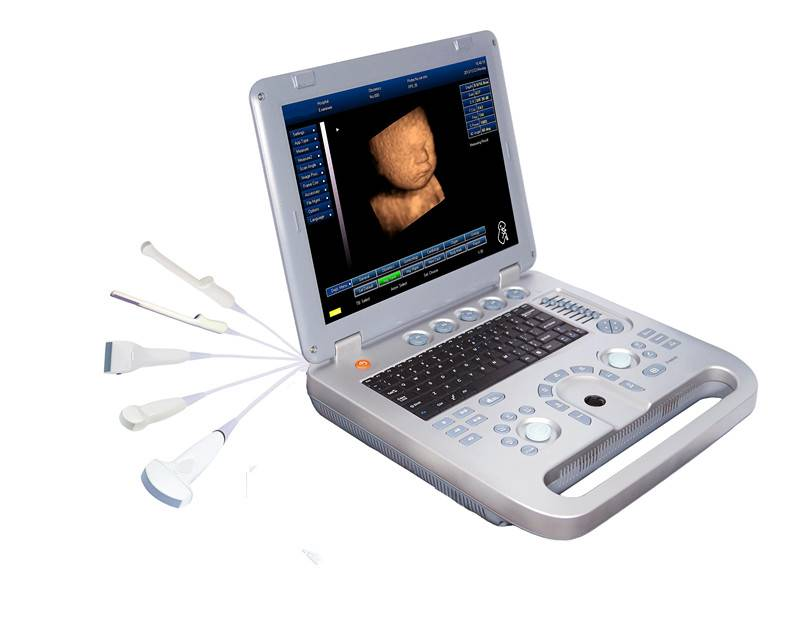
Фото: ecplaza.net
Ультразвуковое сканирование чаще всего используется в медицине — в аппаратах для УЗИ, а также в речном и морском деле, в частности — в рыбной ловле. Современные эхолоты, как и аппараты для ультразвуковой диагностики, представляют собой частный случай звукового 3D-сканера — устройство испускает ультразвук в исследуемую среду, микрофоны устройства ловят отраженный сигнал, а компьютер создает трехмерную модель на основе полученных данных.

Картинка: amazon.com
В промышленности звуковое 3D-сканирование используется реже вышеназванных методов, обычно в дефектоскопии — для обнаружения каверн и пустот внутри изделий, а это отдельная большая тема, потому здесь этот метод подробно не рассматриваем.
Самый массовый метод
Из перечисленных методов, фотограмметрия — наиболее массовый, ведь при желании можно сделать 3d сканер из телефона android с приличной камерой.
При использовании любительского оборудования, такого как камера смартфона, 3D-сканирование фотограмметрией проводится обычно в развлекательных целях, но при съемке качественными камерами — и в более прикладных, например — в создании высококачественных 3d моделей для кино и компьютерных игр, при реставрации и репродукции произведений искусства.
Хороший пример: Как мы делали копию «Рабочего и колхозницы» Мухиной для музея Европарламента.
Также, и это первоначальное ее применение, фотограмметрия активно используется в картографии, геодезии, строительстве, архитектуре.
Различные методы лазерного сканирования, наряду со структурированным светом также весьма востребованы в разных отраслях науки и промышленности.
Механическое и ультразвуковое сканирование тоже применяются, но менее распространены.
Программное обеспечение

Источник: abatmenty.ru
Существует немало специализированых программ 3d сканеров — от любительских, для смартфонов и фотокамер, до весьма серьезных отраслевых и универсальных решений, позволяющих создавать точные 3D модели. Ниже — обзор наиболее функциональных из них.
Для работы с 3D-сканером

Источник: 3dprintingindustry.com
В этом разделе — только профессиональное программное обеспечение для 3d сканера от различных разработчиков. Возможности этого софта практически весьма широки, но и стоимость весьма высока.
Inspection Software — Geomagic Control X

Источник: www.3dsystems.com
Этот программный продукт позиционируется разработчиками как оптимальное решение для проведения поверхностной дефектоскопии и контроля линейных размеров различных деталей. Буквально для каждой плоскости можно задать размер и допустимое отклонение, а это значит при серийном производстве контроль качества будет занимать значительно меньше времени: достаточно один раз настроить алгоритм измерения. Для сборочных производств Geomagic Control X можно использовать для выявления дефектов в деталях, поступивших от поставщиков.

Источник: solicad.com
Но возможности программы не ограничиваются только контролем. Geomagic Control X работает в связке с CAD и может быть использовано для расчета температурных деформаций, изменение размеров после литья и других. Благодаря данному функционалу можно корректировать исходную модель, снижая издержки на возможный брак еще до того, как деталь отправится в производство.
И, наконец, данная программа для 3d сканирования может быть использована для оценки износа и выявления дефектов в уже эксплуатируемых деталях. Алгоритмы Geomagic Control X позволяют отслеживать изменения в геометрии детали, которые происходят с течением времени, что позволяет обнаруживать ряд непредвиденных проблем и своевременно принимать корректирующие меры. Проведение анализа тенденций и составление подробных отчетов в самой программе,позволяет предсказывать выход из строя исследуемой детали или инструмента.
Обзор некоторых возможностей программы в этом видео:
Продукты Creaform — VXmodel

Источник: cision.com
Компания Creaform предлагает целый комплекс, состоящий из нескольких программ для 3д сканирования и работы с моделями, с разным функционалом и областью применения. Большинству пользователей будет наиболее интересен софт VXmodel, который предлагает массу возможностей для сканирования и переноса обработанных результатов в CAD-системы.

Источник: 3d-skenovani.cz
Само программное обеспечение обеспечивает устранение большинства дефектов сканирования и позволяет выравнивать и объединять грани модели, заполнять отверстия и снижать плотность сетки, удаляя ненужные точки. Кроме того, VXmodel позволяет объединять несколько результатов сканирования в одну модель, что полезно при сканировании больших предметов.
Дополнительные возможности автоматического и ручного создания кривых и поверхностей, а также легкий перенос результатов работы в Solid Works и Autodesk Inventor делают этот софт практически незаменимым для тех, кому приходится много сканировать и параллельно вести “очистку” моделей от погрешностей.
Короткое видео, рассказывающее об основных возможностях программы для 3d сканирования:
Faro Scene

Источник: streambend.net
FARO® — известный производитель 3d сканеров, который предлагает собственные решения для обработки облаков точек собранных с помощью данных устройств. Приложение совместимо как с устройствами под брендом компании, так и с большинством других.
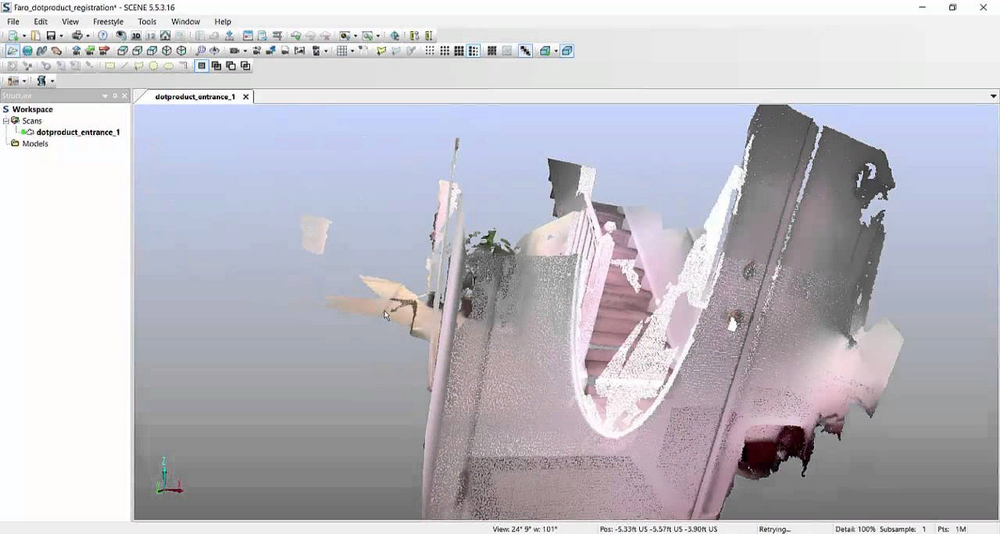
Источник: youtube.com
Особенностью данной программы для 3d scanner-а является необычайно высокий уровень визуализации, а также возможность просмотра результатов в VR-среде. Кроме того, возможность автоматического наложения фотоизображения на полученную модель позволяет получать сканы содержащие информацию о цвете изделия.
В процессе сканирования пользователь получает информацию о уже собранных точках и прогрессе построения модели в режиме реального времени. Данное решение с
top3dshop.ru
Самодельный сканирующий лазерный дальномер / Habr
В этой статье я расскажу о том, как я делал самодельный лазерный сканирующий дальномер, использующий триангуляционный принцип измерения расстояния, и об опыте его использования на роботе.
Зачем нужен сканирующий дальномер?
На сегодняшний день в робототехнике не так уж и много методов навигации внутри помещений. Определение положения робота в пространстве с использованием лазерного сканера — один из них. Важное достоинство этого метода — он не требует установки в помещении каких-либо маяков. В отличие от систем, использующих распознавание изображения с камер, обработка данных с дальномера не так ресурсоемка. Но есть и недостаток — сложность, и соответственно, цена дальномера.
Традиционно в робототехнике используются лазерные сканеры, использующие фазовый или времяпролетный принцип для измерения расстояния до объектов. Реализация этих принципов требует довольно сложной схемотехники и дорогих деталей, хотя и характеристики при этом получаются приличные — используя эти принципы, можно добиться высокой скорости сканирования и большой дальности измерения расстояния.
Но для домашних экспериментов в робототехнике такие сканеры мало подходят — цена на них начинаются от 1000$.
На помощь приходят дальномеры, использующие триангуляционный принцип измерения расстояния. Дальномер такого типа впервые появился в роботах-пылесосах Neato:
Довольно быстро любители расшифровали протокол этого дальномера, и начали использовать его в своих проектах. Сами дальномеры в качестве запчастей появились на ebay в небольших количествах по цене около 100$. Через несколько лет китайская компания смогла выпустить сканирующий дальномер RPLIDAR, который поставлялся как полноценный прибор, а не запчасть. Только цена этих дальномеров оказалась достаточно высокой — 400$.
Самодельный дальномер
Как только я узнал о дальномерах Neato, мне захотелось собрать самому аналогичный. В конце концов, мне это удалось, и процесс сборки я описал на Робофоруме.
Первая версия дальномера:
Позже я сделал еще одну версию дальномера, более пригодную для использования на реальном роботе, но и ее качество работы не полностью устроило меня. Настало время третьей версии дальномера, и именно она будет описана далее.
Устройство сканирующего триангуляционного лазерного дальномера
Принцип измерения расстояния до объекта основан на измерении угла между лазерным лучом, попадающим на объект, и объективом дальномера. Зная расстояние лазер-объектив (h) и измеренный угол, можно вычислить расстояние до объекта — чем меньше угол, тем больше расстояние.
Принцип хорошо иллюстрирует картинка из статьи:
Таким образом, ключевые оптические компоненты такого дальномера — лазер, объектив и фотоприемная линейка.
Так как дальномер сканирующий, то все эти детали, а так же управляющая электроника устанавливаются на вращающейся головке.
Тут может возникнуть вопрос — зачем нужно вращать оптику и электронику, ведь можно установить вращающееся зеркало? Проблема в том, что точность дальномера зависит от расстояния между объективом и лазером (базового расстояния), так что оно должно быть достаточно большим. Соответственно, для кругового сканирования понадобится зеркало диаметром, большим базового расстояния. Дальномер с таким зеркалом получается достаточно громоздким.
Сканирующая головка дальномера при помощи подшипника закрепляется на неподвижном основании. На нем же закрепляется двигатель, вращающий головку. Также в состав дальномера должен входить энкодер, предназначенный для получения информации о положении головки.
Как видно, дальномеры Neato, RPLIDAR и мои самодельные сделаны именно по этой схеме.
Самое сложное в самодельном дальномере — изготовление механической части. Именно ее работа вызывала у меня больше всего нареканий в ранних версиях дальномера. Сложность заключается в изготовлении сканирующей головки, которая должна быть прочно закреплена на подшипнике, вращаться без биений и при этом не нее нужно каким-то образом передавать электрические сигналы.
Во второй версии дальномера первые две проблемы я решил, использовав части старого HDD — сам диск использовался как основание сканирующей головки, а двигатель, на котором он закреплен, уже содержал качественные подшипники. В то же время, при этом возникла третья проблема — электрические линии можно было провести только через небольшое отверстие в оси двигателя. Мне удалось сделать самодельный щеточный узел на 3 линии, закрепленный в этом отверстии, но получившаяся конструкция получилась шумной и ненадежной. При этом возникла еще одна проблема — линии, чтобы пробросить сигнал энкодера, не было, и датчик энкодера в такой конструкции должен быть установлен на головке, а диск энкодера с метками — на неподвижном основании. Диск энкодера получился не жестким, и это часто вызывало проблемы.
Фотография второй версии дальномера:
Еще один недостаток получившегося дальномера — низкая скорость сканирования и сильное падение точности на расстояниях больше 3м.
Именно эти недостатки я решил устранить в третьей версии дальномера.
Электроника
В принципе, электронная часть триангуляционного дальномера достаточно проста и содержит всего два ключевых компонента -светочувствительную линейку и микроконтроллер. Если с выбором контроллера проблем нет, то с линейкой все значительно сложнее. Светочувствительная линейка, используемая в подобном дальномере, должна одновременно иметь достаточно высокую световую чувствительность, позволять считывать сигнал с высокой скоростью и иметь маленькие габариты. Различные CCD линейки, применяемые в бытовых сканерах, обычно довольно длинные. Линейки, используемые в сканерах штрихкодов — тоже не самые короткие и быстрые.
В первой и второй версии дальномера я использовал линейки TSL1401 и ее аналог iC-LF1401. Эти линейки хорошо подходят по размеру, они дешевые, но содержат всего 128 пикселей. Для точного измерения расстояния до 3 метров этого мало, и спасает только возможность субпискельного анализа изображения.
В третьей версии дальномера я решил использовать линейку ELIS-1024:
Однако купить ее оказалось непросто. У основных поставщиков электроники этих линеек просто нет.
Первая линейка, которую я смог купить на Taobao, оказалась нерабочей. Второю я купил на Aliexpress (за 18$), она оказалась рабочей. Обе линейки выглядели паянными — обе имели облуженные контакты и, судя по маркировке, были изготовлены в 2007 году. Причем даже на фотографиях у большинства китайских продавцов линейки именно такие. Похоже, что действительно новую линейку ELIS-1024 можно купить только напрямую у производителя.
Светочувствительная линейка ELIS-1024, как следует из названия, содержит 1024 пикселя. Она имеет аналоговый выход, и достаточно просто управляется.
Еще более хорошими характеристиками обладает линейка DLIS-2K. При сходных размерах, она содержит 2048 пикселей и имеет цифровой выход. Насколько мне известно, именно она используется в дальномере Neato, и возможно, в RPLIDAR. Однако, найти ее в свободной продаже очень сложно, даже в китайских магазинах она появляется не часто и дорого стоит — более 50$.
Так как я решил использовать линейку с аналоговым выходом сигнала, то микроконтроллер дальномера должен содержать достаточно быстрый АЦП. Поэтому я решил использовать серию контроллеров — STM32F303, которые, при относительно небольшой стоимости, имеют несколько быстрых АЦП, способных работать одновременно.
В результате у меня получилась такая схема:
Сигнал с линейки (вывод 10) имеет достаточно высокий уровень постоянной составляющей, и ее приходится отфильтровывать при помощи разделительного конденсатора.
Далее сигнал нужно усилить — для этого используется операционный усилитель AD8061. Далеко расположенные объекты дают достаточно слабый сигнал, так что пришлось установить коэффициент усиления равным 100.
Как оказалось в результате экспериментов, даже при отсутствии сигнала, на выходе выбранного ОУ по какой-то причине постоянно присутствует напряжение около 1.5В, что мешает обработке результатов и ухудшает точность измерения амплитуды сигнала. Для того, чтобы избавится от этого смещения, мне пришлось подать дополнительное напряжение на инвертирующий вход ОУ.
Плату разводил двухстороннюю, сделать такую плату в домашних условиях качественно довольно сложно, так что заказал изготовление плат в Китае (пришлось заказать сразу 10 штук):
В этом дальномере я использовал дешевый объектив с резьбой M12, имеющий фокусное расстояние 16мм. Объектив закреплен на печатной плате при помощи готового держателя объектива (такие используются в различных камерах).
Лазер в данном дальномере — инфракрасный (780 нм) лазерный модуль, мощностью 3.5 мВт.
Изначально я предполагал, что излучение лазера нужно будет модулировать, но позже оказалось, что с используемой линейкой в этом нет смысла, и поэтому сейчас лазер включен постоянно.
Для проверки работоспособности электроники была собрана вот такая конструкция, имитирующая сканирующую головку дальномера:
Уже в таком виде можно было проверить, какую точность измерения расстояния позволяет обеспечить дальномер.
Для анализа сигнала, формируемого линейкой, были написаны тестовые программы для микроконтроллера и ПК.
Пример вида сигнала с линейки (объект на расстоянии 3 м).
Изначально схема была не совсем такая, как приведена выше. В ходе экспериментов мне пришлось частично переделать изначальную схему, так что, как видно из фотографий, некоторые детали пришлось установить навесным монтажом.
Механическая часть
После того, как электроника была отлажена, настало время изготовить механическую часть.
В этот раз я не стал связываться с механикой из HDD, и решил изготовить механические детали из жидкого пластика, заливаемого в силиконовую форму. Эта технология подробно описана в Интернете, в том числе и на Гиктаймс.
Уже после того, как я изготовил детали, стало понятно, что изготовить детали на 3D принтере было бы проще, они могли выйти тверже, и возможно, можно было бы сделать одну деталь вместо двух. Доступа к 3D принтеру у меня нет, так что пришлось бы заказывать изготовление детали в какой-либо компании.
Фото одной из деталей сканирующей головки дальномера:
Эта деталь является основой головки. Она состоит из втулки, на которую позже надевается подшипник, и диска. Диск предназначен для крепления второй детали башни, кроме того, на него снизу наклеивается диск энкодера.
Втулка и диск содержат сквозное отверстие, в которое вставляется покупной щеточный узел на 6 линий — его видно на фотографии. Именно те провода, что видны на фотографии, могут вращаться относительно корпуса этого узла. Для повышения стабильности работы для передачи сигналов GND и UART TX используется 2 пары линий щеток. Оставшиеся 2 линии используются для передачи напряжения питания и сигнала энкодера.
Силиконовая форма для отливки этой детали:
Вторая деталь сканирующей головки была изготовлена тем же способом. Она предназначена для крепления печатной платы и лазера к диску. К сожалению, фотографий изготовления этой детали у меня не сохранилось, так что ее можно увидеть только в составе дальномера.
Для крепления сканирующей головки к основанию дальномера используется шариковый подшипник. Я использовал дешевый китайский подшипник 6806ZZ. Честно говоря, качество подшипника мне не понравилось — ось его внутренней втулки могла отклонятся относительно оси внешней на небольшой угол, из-за чего головка дальномера тоже немного наклоняется. Крепление подшипника к детали с диском и основанию будет показано ниже.
Основание я сделал из прозрачного оргстекла толщиной 5 мм. К основанию крепится подшипник, датчик энкодера, двигатель дальномера и маленькая печатная плата. Само основание устанавливается на любую подходящую поверхность при помощи стоек.
Вот так выглядит основание дальномера снизу:
Печатная плата содержит регулируемый линейный стабилизатор напряжения для питания двигателя, и площадки для подключения проводов узла щеток. Сюда же подводится питание дальномера.
Как и в других дальномерах, двигатель вращает сканирующую головку при помощи пассика. Для того, чтобы он не сваливался с втулки, на ней имеется специальное углубление.
Как видно из фотографии, подшипник закреплен в основании при помощи трех винтов. На сканирующей головке подшипник удерживается за счет выступа на втулке и прижимается к ней другими винтами, одновременно удерживающими щеточный узел.
Энкодер состоит из бумажного диска с напечатанными рисками и оптопары с фототранзистором, работающей на отражение. Оптопара закреплена при помощи стойки на основании так, что плоскость диска оказывается рядом с ней:
Сигнал от оптопары через щетки передается на вход компаратора микроконтроллера. В качестве источника опорного напряжения для компаратора выступает ЦАП микроконтроллера.
Для того, чтобы дальномер мог определить положение нулевого угла, на диск энкодера нанесена длинная риска, отмечающая нулевое положение головки (она видна справа на фотографии выше).
Вот так выглядит собранный дальномер:
Вид сверху:
Разъем сзади дальномера используется для прошивки микроконтроллера.
Для балансировки сканирующей головки на нее спереди устанавливается крупная гайка — она практически полностью устраняет вибрацию при вращении головки.
Собранный дальномер нужно отюстировать — установить лазер в такое положение, чтобы отраженный от объектов свет попадал на фотоприемную линейку. Обе пластмассовые детали содержат соосные отверстия, располагающиеся под пазом лазера. В отверстия вворачиваются регулировочные винты, упирающиеся в корпус лазера. Поворачивая эти винты, можно изменять наклон лазера.
Наблюдая в программе на компьютере форму и амплитуду принятого сигнала и изменяя наклон лазера, нужно добиться максимальной амплитуды сигнала.
Также триангуляционные дальномеры требуют проведения калибровки, о чем я писал ранее:
Для того, чтобы при помощи датчика можно было измерять расстояние, нужно произвести его калибровку, т.е. определить закон, связывающий результат, возвращаемый датчиком, и реальное расстояние. Сам процесс калибровки представляет собой серию измерений, в результате которых формируется набор расстояний от датчика до некоторого объекта, и соответствующих им результатов.
В данном случае калибровка представляла собой серию измерений расстояний до различных объектов самодельным дальномером и лазерной рулеткой, после чего по полученным парам измерений выполняется регрессионный анализ и составляется математическое выражение.
Получившийся дальномер имеет существенный недостаток — из-за отсутствия модуляции излучения лазера он некорректно работает при любой сильной засветке. Обычное комнатное освещение (даже при использовании мощной люстры) не влияет на работу дальномера, но вот расстояние до поверхностей, прямо освещенных Солнцем, дальномер измеряет неправильно. Для решения этой проблемы в состав дальномера нужно включить интерференционный светофильтр, пропускающий световое излучение только определенной длины волны — в данном случае 780 нм.
Эволюция самодельных дальномеров:
Габаритные размеры получившегося дальномера:
Размер основания: 88×110 мм.
Общая высота дальномера: 65 мм (может быть уменьшена до 55 при уменьшении высоты стоек).
Диаметр сканирующей головки: 80 мм (как у mini-CD диска).
Как и у любого другого триангуляционного дальномера, точность измерения расстояния этого дальномера резко падает с ростом расстояния.
При измерениях расстояния до объекта с коэффициентом отражения около 0.7 у меня получились примерно такие точностные характеристики:
| Расстояние | Разброс |
|---|---|
| 1 м | <1 см |
| 2 м | 2 см |
| 5 м | 7 см |
Стоимость изготовления дальномера:
| DIY, $ | Опт., $ | |
|---|---|---|
| Основание | ||
| Пластина основания | 1,00 | 0,50 |
| Двигатель | 0,00 | 1,00 |
| Подшипник | 1,50 | 1,00 |
| Щеточный узел | 7,50 | 5,00 |
| Крепежные детали | 0,00 | 2,00 |
| Сканирующая головка | ||
| Контроллер STM32F303CBT6 | 5,00 | 4,00 |
| Фотоприемная линейка | 18,00 | 12,00 |
| Остальная электроника | 4,00 | 3,00 |
| Плата | 1,50 | 0,50 |
| Объектив | 2,00 | 1,50 |
| Держатель объектива | 1,00 | 0,50 |
| Лазер | 1,00 | 0,80 |
| Пластиковые детали | 3,00 | 2,00 |
| Крепежные детали | 0,00 | 1,00 |
| Сборка | 0,00 | 20,00 |
| Итого: | 45,50 | 54,80 |
В первой колонке — во сколько дальномер обошелся мне, во второй — сколько он мог бы стоить при промышленном изготовлении (оценка очень приблизительная).
Программная часть дальномера
Перед написанием программы нужно рассчитать тактовую частоту, на которой будет работать фотоприемная линейка.
В старых версиях дальномера частота сканирования была ограничена 3 Гц, в новом дальномере я решил сделать ее выше — 6Гц (это учитывалось при выборе линейки). Дальномер делает 360 измерений на один оборот, так что при указанной скорости он должен быть способен производить 2160 измерений в секунду, то есть одно измерение должно занимать менее 460 мкс. Каждое измерение состоит из двух этапов — экспозиция (накопление света линейкой) и считывание данных с линейки. Чем быстрее будет произведено считывание сигнала, тем длиннее может быть время экспозиции, а значит, и тем больше будет амплитуда сигнала. При тактовой частоте линейки 8 МГц время считывания 1024 пикселей будет составлять 128 мкс, при 6 МГц — 170 мкс.
При тактовой частоте микроконтроллера серии STM32F303 в 72 МГц максимальная частота выборок АЦП — 6 MSPS (при разрядности преобразования 10 бит). Так как я хотел проверить работу дальномера при тактовой частоте линейки 8 МГц, я решил использовать режим работы АЦП, в котором два АЦП работают одновременно (Dual ADC mode — Interleaved mode). В этом режиме по сигналу от внешнего источника начала запускается ADC1, а затем, через настраиваемое время, ADC2:
Как видно из диаграммы, суммарная частота выборок АЦП в два раза выше, чем частота триггера (в данном случае это сигнал от таймера TIM1).
При этом TIM1 также должен формировать сигнал тактовой частоты для фотоприемной линейки, синхронный с выборками АЦП.
Чтобы получить с одного таймера два сигнала с частотами, различающимися в два раза, можно переключить один из каналов таймера в режим TIM_OCMode_Toggle, а второй канал должен формировать обычный ШИМ сигнал.
Структурная схема программы дальномера:
Ключевой частью программы является именно захват данных с линейки и управление ей. Как видно из схемы, этот процесс идет на аппаратном уровне, за счет совместной работы TIM1, ADC1/2 и DMA. Для того, чтобы время экспозиции линейки было постоянным, используется таймер TIM17, работающий в режиме Single Pulse.
Таймер TIM3 генерирует прерывания при срабатывании компаратора, соединенного с энкодером. За счет этого рассчитывается период вращения сканирующей головки дальномера и ее положение. По полученному периоду вращения рассчитывается период таймера TIM16 таким образом, чтобы он формировал прерывания при повороте головки на 1 градус. Именно эти прерывания служат для запуска экспозиции линейки.
После того, как DMA передаст все 1024 значения, захваченные ADC, в память контроллера, программа начинает анализ эти данных: сначала производится поиск положения максимума сигнала с точностью до пикселя, затем, при помощи алгоритма поиска центра тяжести — с более высокой точностью (0.1 пикселя). Полученное значение сохраняется в массив результатов. После того, как сканирующая головка сделает полный оборот, в момент прохождения нуля этот массив предаются в модуль UART при помощи еще одного канала DMA.
Использование дальномера
Качество работы этого дальномера, как предыдущих, проверялось при помощи самописной программы. Ниже пример изображения, формируемого этой программой в результате работы дальномера:
Однако дальномер делался не для того, чтобы просто лежать на столе — он был установлен на старый пылесос Roomba 400 вместо дальномера второй версии:
Также на роботе установлен компьютер Orange Pi PC, предназначенный для управления роботом и связи с ним.
Как оказалось, из-за большой просадки напряжения на линейном источнике питания двигателя дальномера, для работы на скорости 6 об/сек дальномеру требуется питающее напряжение 6В. Поэтому Orange Pi и дальномер питаются от отдельных DC-DC преобразователей.
Для управления роботом и анализа данных от дальномера я использую ROS.
Данные от дальномера обрабатываются специальным ROS-драйвером (основанном на драйвере дальномера Neato), который получает по UART данные от дальномера, пересчитывает их в расстояния до объектов (используя данные калибровки) и публикует их в стандартном формате ROS.
Вот так выглядит полученная информация в rviz (программа для визуализации данных ROS), робот установлен на полу:
Длина стороны клетки — 1 метр.
После того, как данные попали в ROS, их можно обрабатывать, используя уже готовые пакеты программ. Для того, чтобы построить карту квартиры, я использовал hector_slam. Для справки: SLAM — метод одновременного построения карты местности и определения положения робота на ней.
Пример получившейся карты квартиры (форма несколько необычна, потому что дальномер “видит” мебель, а не стены, и не все комнаты показаны):
ROS позволяет объединять несколько программ (“узлов” в терминологии ROS), работающих на разных компьютерах, в единую систему. Благодаря этому, на Orange Pi можно запускать только ROS-драйверы Roomba и дальномера, а анализ данных и управление роботом вести с другого компьютера. При этом эксперименты показали, что hector_slam нормально работает и на Orange Pi, приемлемо загружая процессор, так что вполне реально организовать полностью автономную работу робота.
Система SLAM благодаря данным от дальномера позволяет роботу определять свое положение в пространстве. Используя данные о положении робота и построенную карту, можно организовать навигационную систему, позволяющую “направить” робота в указанную точку на карте. ROS содержит в себе пакет программ для решения этой задачи, но, к сожалению, я так и не смог заставить его качественно работать.
Видео работы дальномера:
Более подробное видео построения карты при помощи hector_slam:
Исходные коды программы контроллера
P. S. Также у меня есть проект более простого лидара.
habr.com
Технологии 3d сканирования – Блог
Прежде чем вы решите приобрести 3D-сканер, важно, чтобы вы изучили, что это за технология работает на самом деле. Во-первых, 3D-сканер фиксирует твердотельный. Затем данные об изображении, передаются в программу трехмерного моделирования и оттуда могут быть отредактированы или изменены в программном обеспечении для 3d моделирования, распечатаны, вставлены в видеоигру и так далее. После того, как модель подготовлена, она может быть экспортирована в файл STL и напечатана на 3D принтере. По сути, это означает, что все, что вы видите в своей повседневной жизни, можно сделать с помощью 3D-печати, будь то маленький предмет, такие как украшения или большой предмет, такой как автомобиль или дом. Есть много разных технологий и аспектов, которые следует учитывать при покупке 3D-сканера. Наиболее интересные разберем в этой статье.
Фотограмметрия

Эта технология 3D-сканирования предшествует эпохе компьютеров: после изобретения фотографии ученые быстро поняли, что могут применять принцип естественного стереозрения в своих областях. Используя изображения, снятые с двух немного разных позиций, они смогли измерить и определить местоположение точек объектов в трехмерном пространстве, эксперты называют этот процесс «триангуляцией».
По сей день Фотограмметрия используется геодезистами для составления карт с высокой точностью, это оказалось особенно полезным в горных районах, которые труднодоступны или для 3D-сканирования другими технологиями.
Современные компьютерные программы триангулируют целые здания или объекты размером с обувь. В настоящее время даже телефоны можно превратить в портативные 3D-сканеры, просто установив соответствующее приложение. Точность во многом обусловлена качеством изображений. Чем лучше камера с помощью которой вы передаете данные и больше снимков с разных ракурсов, тем лучше будет ваша 3d модель. Для создания полной 3d модели необходимо сделать много кадров, перемещаясь вокруг объектов с шагом 15–30 градусов, повторяйте это на разных высотах, особенно при 3D сканировании сложных объектов, то есть имеющих много коллизий. Имейте в виду, что для триангуляции точки ее необходимо сфотографировать как минимум дважды, иначе у вашей сетки будут провалы.
Структурированный свет

Эти устройства проецируют геометрические узоры на поверхность объекта, в то время как камера регистрирует искажение изображения. Основываясь на смещении рисунка, можно рассчитать местоположение каждой точки. Поскольку шаблоны могут быть спроецированы только из одной точки наблюдения за один раз, необходимо объединить несколько 3D-сканов, чтобы сформировать полную сетку 360 °. Некоторые производители обходят это ограничение, устанавливая объект на моторизованном поворотном столе и автоматически совмещая 3D-изображения. Эти 3D-сканеры очень точны, разрешение составляет десятки микрометров. В отличие от лазерных 3D-сканеров, эта технология абсолютно безопасна для людей и животных. Диапазон 3D сканирования ограничен несколькими метрами. Технология структурированного света применяется как в стационарных, так и в портативных 3D-сканерах.
TOF (Время полета)

3D сканеры Time of Flight (TOF) еще более изобретательны. Они определяют расстояние до объекта, измеряя время, которое лазерный или инфракрасный луч посылает на отражение в 3D-сканере. Неотъемлемым компонентом этого устройства является скорость света. Время прохождения туда и обратно определяет расстояние, пройденное световым лучом. Если вы считаете, что для достижения Земли требуется солнечный свет всего 8 минут и 17 секунд, вы получите представление о том, насколько точны датчики в этих сканерах для работы. Но даже у мощных TOF-сканеров есть недостатки, различия в температуре, влажности и другие факторы влияют на скорость света и препятствуют способности 3D-сканера точно измерять время прохождения сигнала в обоих направлениях, поэтому их точность сравнительно низкая, в диапазоне сантиметров., В основном они используются для сканирования больших структур, таких как здания. Как и в случае с другими технологиями, невозможно создать сплошные сетки за одно сканирование. TOF-3D-сканеры с использованием лазерных лучей не должны использоваться при 3D сканировании людей или животных. Многие устройства, использующие этот подход, разработаны как портативные 3D-сканеры.
Триангуляция (лазерный 3D-сканер)

Триангуляционные 3D-сканеры, или лазерные 3D-сканеры, похожи на фотограмметрию и 3D-сканеры со структурированным светом в том, что они используют один и тот же базовый геометрический принцип для определения местоположения точки в пространстве. Лазерный 3D-сканер проецирует лазерный луч на объект, а камера регистрирует место, где лазер попадает на объект. Поскольку углы и измерения лазера и камеры известны, лазерная точка (или линия) может быть точно определена. Эти 3D-сканеры обладают исключительной точностью, разрешение составляет десятки микрометров. С другой стороны, их диапазон ограничен всего несколькими метрами. Триангуляционные 3D-сканеры, испускающие лазерную линию, способны сканировать движущиеся объекты. Эта технология обычно не встречается в портативных 3D-сканерах.
Контактные 3D сканеры

Контактные 3D-сканеры физически касаются объекта, который лежит на поверхности или прикреплен к какой-либо форме буровой установки, которая удерживает его на месте. Обычно это медленный процесс, так как даже незначительные вибрации могут исказить сканирование. Хотя эти 3D-сканеры производят точные сканирования, которые используют контроль качества в машиностроении, датчики могут изменять или даже потенциально вредить сканируемым объектам; По этой причине контактные 3D-сканеры не используются для сохранения наследия.
Какой тип 3D сканера лучше
Выбрать правильный 3D-сканер не так просто. Есть много критериев, которые необходимо учитывать перед покупкой устройства. Например, определенный 3D-сканер может быть лучшим для архитектурных целей, но все же может оказаться неподходящим для прототипирования. Вы можете воспользоваться недорогим канцелярским сканером или использовать универсальное портативное устройство.
Прежде чем мы углубимся в различные 3D-сканеры, доступные на рынке, давайте взглянем на различные аспекты, которые вы должны учитывать. Мы собрали список наиболее важных характеристик, которые следует учитывать при покупке 3D-сканера.
Области применения
Первый вопрос, который вы должны задать себе: для чего вы хотите использовать сканер?
Требования варьируются в зависимости от области. Например, разработчик игры, просто создающий игровые ресурсы, будет заинтересован не только сеткой с высоким разрешением, но и текстурой объекта. Если это так, фотограмметрия будет логическим решением в этом случае. Тем не менее, производитель, который хочет 3D-печать чего-то , что он видел в реальности, будет более заинтересован в точных измерениях объекта. Поэтому они, вероятно, выберут 3D-сканер на основе структурированного света. Вы также должны очень рано решить, где вы хотите 3D-сканирование ваших объектов. Если они относительно небольшие, и вы можете принести их в свой офис или домой, купите стационарный 3D-сканер. Если нет, вам нужен портативный 3D-сканер.
Вы должны определить, что именно вы хотите 3D-сканирование. Не существует устройства, которое охватывает все области применения.
Для 3D-сканирования людей и животных нельзя использовать 3D-лазерный сканер, поскольку это может привести к повреждению глаз. Фотограмметрия может быть хорошим выбором, но эта технология требует, чтобы объект оставался совершенно неподвижным. Таким образом, хотя вы можете получить отличные 3D-сканы от ваших друзей и семьи, вы можете найти свою собаку трудным предметом.
Лазерные 3D-сканеры — отличный выбор, если вы хотите сканировать большие неодушевленные объекты, такие как здания или транспортные средства.
Если вы заинтересованы в реверс-инжиниринге, то есть вам нужны чрезвычайно точные измерения, структурированный свет или контактные 3D-сканеры.
Однако 3D-сканеры Contact не подходят для проектов, связанных с сохранением наследия, поскольку этот процесс может изменить или даже уничтожить деликатные предметы. В этом случае лучшим 3D-сканером является структурированный световой сканер.
Размеры / Расстояние до объекта
Большинство потребительских 3D-сканеров (структурированный свет) предназначены для 3D-сканирования объектов размером с обычный чайник с близкого расстояния. Но это правда, что вы часто можете «сшить» несколько 3D-сканов в один кусок. Вообще говоря, чем больше ваши объекты или чем дальше, тем дороже будет 3D лазерный сканер. Исключение составляют программы фотограмметрии, которые обычно имеют разумную цену и дают отличные результаты.
Поверхность объекта
Еще один фактор, который следует учитывать при покупке лучшего 3D-сканера, — это поверхность вашего объекта. Как у фотограмметрии, так и у 3D-сканеров со структурированным светом есть серьезные проблемы с отражающими и прозрачными поверхностями, которые не могут быть обработаны и приведут к искаженным и фрагментированным сеткам. Даже самый лучший 3D-сканер не даст удовлетворительных результатов при столкновении с плохо подходящими поверхностями. Если ваше сердце настроено на эти технологии, это ограничение часто преодолевается путем нанесения тонкого слоя непрозрачного лака.
Наконец, единственная самая важная особенность во многих областях применения — это точность 3D-сканирования. Контактные 3D-сканеры обладают исключительной точностью, но их цены варьируются от 30 000 до 200 000 долларов. Опять же, вы должны спросить себя: для чего вы хотите использовать сканы? Сколько разрешения достаточно для выполнения работы?
getfab.ru
Десять лучших 3D-сканеров от 100 до 100 000 долларов / Habr
Вам нужна 3Д-модель для 3D-печати? Для вас есть несколько путей: вы конечно можете создать свою 3Д-модель с нуля в программе 3Д-моделирования или найти подходящую в интернете, но вы также можете отсканировать существующий объект! Цель этого обзора — помочь вам разобраться в разнообразии существующих 3D-сканеров и предложить лучшие в каждом ценовом сегменте от фотограмметрического приложения для смартфона, до профессиональных 3D-сканеров.
Сканеры идут в порядке возрастания цены так, что вы сможете выбрать подходящий в рамках своего бюжета и использовать полученные 3D-модели, как для 3D-печати, так и для анимации.
Если вам не хватит предложенных решений по этой ссылке есть расширенный обзор.
3D сканер в руке:
1. Лучшее приложение для смартфона: Autodesk 123D Catch (free)
Autodesk 123D Catch — это бесплатное приложение работающее по фотограмметрическому принципу. Оно позволяет создать 3Д-модель по фотографиям объекта снятым с разных сторон. Вы можете использовать его для сканирования объектов, людей и даже ландшафта. Для некоторых приложений, если вам не нужна совершенная точность, вам не потребуется специальное оборудование. Это приложение на самом деле обеспечивает весьма неплохую детализацию и просто в использовании. Тем не менее, вам понадобится как минимум 30 минут, пока приложение обработает ваши фотографии, так-как обработка происходит на сервере и нужно время, чтобы их переслать.
2.Лучший 3D сканер “сделай сам”: Kinect ($99,99)
Xbox Kinect создан для расширения игровых возможностей. Он не предназначен для 3Д сканирования, но вы легко найдёте руководства и стороннее ПО (например ReconstructMe) чтобы превратить его в 3Д-сканер. Если ваши руки растут из плеч это интересное и недорогое решение для 3Д-сканирования.
Цена: $99.99
Разрешение: 0.051 мм
3. Лучший 3Д-сканирующий аксессуар для мобильного устройства: Occipital Structure Sensor ($379)
Этот сканер можно присоединить к вашему планшету или телефону (вообще он предназначен для аЙпада, но можно приспособить и к другим устройствам). Лёгкий и простой в использовании, при этом имеет весьма хорошее разрешение. Подходит для больших предметов (можно отсканировать человека в полный рост) и сканирования на улице. Вы сможете использовать его с ПО работающим на Occipital’s SDK. Это повысит разрешение и даст доступ к спец возможностям вроде сканирования комнаты. Это, вероятно, будет не то, что вы будете использовать для 3D-печати, но это интересно для разработки игр, например.
Цена: $379
Разрешение до: 0.5 мм
Точность до: 4 мм
4. Лучший из дешёвых ручных 3D-сканеров: Cubify ($399)
3D-сканеры могут быть довольно доступными по цене и простыми в использовании, если выбирать из недорогих портативных моделей. Cubify очень хорошо подходит под эти критерии и обладает сравнительно неплохим разрешением. Но всё-таки его возможностей не хватает для сканирования текстуры и его лучше использовать для последующей 3Д-печати одноцветных моделей.
Цена: $399
Разрешение: 0.9 мм
Разрешение по глубине при расстоянии 0.5 м: 1 мм
3D-сканер на столе:
5. Лучший и самый дешёвый настольный 3D-сканер: Matter and Form ($519)
Если вы планируете перейти на новый уровень качества, можете приобрести настольный 3Д-сканер. Эта модель компактна, проста в использовании, и обеспечивает хорошее разрешение, особенно учитывая цену (это не ваш вариант если вы стремитесь к совершенству, но отлично подойдёт для образовательных и демонстрационных целей). Процесс сканирования происходит с помощью лазера и вращающейся платформы. Сканирование занимает около пяти минут и одновременно считывает текстуру объекта.
Цена: $519
Разрешение: 0.43 мм
Точность: ±0.25 мм
6. Лучшее устройство “два в одном”: XYZprinting Da Vinci 1.0 ($600)
Это недорогое устройство совмещает в себе 3Д-сканер и 3Д-принтер. Качество моделей не слишком высокое, но и цена весьма низкая для такого комбинированного устройства. Это делает XYZprinting Da Vinci самым простым решением для новичка желающего приобщиться к миру 3Д-сканирования-печати.
Профессиональные 3D-сканеры:
7. Лучшее соотношение цены и качества для портативного 3D-сканера: Fuel3D Scanify ($1490)
Очень простой в использовании, интуитивно понятный, хорошо лежит в руке — этот сканер обеспечивает хорошую точность и качество текстур. Единственное ограничение — размер сканируемой области ограничен, что замечательно для небольших предметов, но для сканирования например человека в полный рост он не подойдёт.
Цена: $1490
Разрешение: 0.35 мм
Точность: до 0.3 мм
8. Лучшая цена\качество для настольного 3D-сканера: DAVID Laserscanner – SLS3 ($3995)
Этот сканер использует отличную от других технологию сканирования. Вместо двухлазерной сканирующей системы, здесь используется источник структурированного света и камеры для быстрого сканирования с весьма высокой детализацией до 0.06 мм! Сканер поставляется с ПО DAVID Pro Edition 3 которое работает с OBJ, STL и PLY форматами 3Д файлов, которые могут быть экспортированы в другие программы для дальнейшего редактирования.
Цена: $3995
Разрешение: 0.06 мм
Точность: 0.5% от размера объекта
9. Лучший настольный профессиональный 3D-сканер: Solutionix Rexcan 4 ($79 900)
Это профессиональный 3Д-сканер и его цена обеспечивает гораздо лучшее качество сканирования. Solutionix Rexcan оснащён двумя камерами для большей точности. Он использует в работе технологию оптической триангуляции по фазовому сдвигу и две CCD камеры высокого разрешения для получения высокоточных данных. Сканер может быть использован для сканирования бОльших объектов за счёт повышения производительности с помощью фотограмметрической системы. В качестве опции может оснащаться автоматически вращающейся платформой способной выдерживать до 50 кг веса.
Цена: $79 900
Точность: от 0,03 до 0,71 мм
10. Лучший профессиональный ручной 3D сканер: MetraSCAN 750 ($50 000 – $100 000)
Creaform MetraSCAN 750 — это полноценное профессиональное, производственное решение для точного 3Д-сканирования. Он лёгок, точен, быстр, и сканирует с великолепной точностью предметы с любым качеством поверхности, с любой текстурой.
Цена: $79 900
Разрешение: 0.050 мм
Точность: До 0.03 мм
Надеемся это было полезное чтение и вы нашли решение для 3Д-сканирования подходящее для ваших потребностей и ваших финансовых возможностей! Если вы хотите узнать больше о фотограмметрии, вы можете прочесть эту статью.
Удачного вам 3Д-сканирования!
habr.com
Лазерные триангуляционные датчики Gocator – Промышленная геодезия
Линейные датчики Gocator
Кадровые датчики Gocator
Главные преимущества :
- Надежность
- Долговечность
- Малые габариты, масса и энергопотребление
- Устойчивость к освещенности окружающей среды и световым колебаниям
- Измерения в трехмерном пространстве позволяют получить данные, связанные с формой и положением, необходимые для управления роботом
- Большая дальность срабатывания
- Возможность измерять объекты с низкой контрастностью
- Высокая повторяемость благодаря встроенной оптике, источникам излучения и предварительной калибровке
- Простой интерфейс пользователя
- Обработка данных в режиме реального времени или поточного производства
Датчики Gocator предназначены для высокоскоростных измерений на микронном уровне в режиме реального времени для решения широкого спектра задач.
Применение лазерных триангуляционных датчиков:
бесконтактное измерение размеров, профиля поверхности, деформаций, вибраций, сортировка, контроль положения, измерение уровня сыпучих материалов и жидкости
в следующих областях промышленности:
- Металлообработка
- Деревообработка
- Кабельная промышленность
- Целлюлозно-бумажная промышленность
- Сфера строительства
- Автоматизированные системы управления технологическими процессами (АСУТП)
Принцип работы:
Лазерные датчики работают по принципу триангуляции. В этом случае расстояние до объекта измеряется следующим образом: луч лазера падает на поверхность предмета, отражается от всех мелких шероховатостей и попадает обратно в приемник. Угол падения луча лазера изменяется в зависимости от расстояния до объекта, и, таким образом, изменяется положение точки лазера на приемнике, который представляет собой фотодиодную линию.
Данные с приемника считываются микроконтроллером, который рассчитывает угол распределения света на фотодиодной линии и по этим данным определяет расстояние до объекта. Применение микроконтроллера гарантирует высокую степень линейности и точности выполнения измерений. Комбинированное применение фотодиодной линии и микроконтроллера позволяет подавить интерферирующие отражения луча, и, таким образом, обеспечивает получение точных данных, даже при критических размерах поверхности измерения. Возможно измерять расстояния как до статических, так и до движущихся объектов.
Таким образом, лазерные датчики предназначены для бесконтактного высокоточного измерения и контроля размеров, толщины деформаций, положения, зазоров, профиля поверхностей, а также для сортировки и распознавания технологических объектов.
3D-сканирование, измерение и контроль сочетаются в одном устройстве – лазерном триангуляционном датчике Gocator. Все датчики заранее откалиброваны на заводе-изготовителе, поэтому пользователь может сразу подключить датчик через веб-браузер и настроить лишь время экспозиции, алгоритм пуска, инструменты пространственных измерений, способ передачи данных.
www.promgeo.com
Главная / Продукция / Датчики / LS2D – лазерный триангуляционный 2-D датчикLS2D – лазерный триангуляционный 2-D датчикLS2D – лазерный триангуляционный 2-D датчик (сканер) со встроенной микропроцессорной системой управления.Сканеры модели LS2D предназначенные для бесконтактного измерения профиля объекта с рассеивающей поверхностью, ширины, толщины металлопроката, внутренних и внешних диаметров, параметров резьбы, обнаружения локальных дефектов продукции, контроля зазоров, сварных швов, распознавания объектов, построения 3-D моделей, а также для использования в различных измерительных системах. Характеристики лазерного триангуляционного 2-D датчика LS2D
1 Наличие программируемых выходов позволяет на базе одного сканера создать систему, выдающую сигналы управления на исполнительные механизмы. Программирование осуществляется с помощью программного обеспечения, поставляемого со сканером. | |
prizmasensors.ru