
Тенденции развития цифровых фотограмметрических систем.
Тема: общие вопросы
Автор: А.Ю. Сечин, «Ракурс», Россия. 2013.
СкачатьPDF, 195 Кб
Развитие современных цифровых фотограмметрических станций обуславливается нескольким факторами, основными являются следующие:– развитие съемочных авиационных и космических систем
– развитие компьютерной техники
– развитие алгоритмов обработки
– развитие компьютерных сетей
Развитие съемочных авиационных и космических систем.
Съемка Земли из космоса для целей картографии и топографии становится все более распространенной и популярной. Растет число космических аппаратов, улучшается разрешение снимков, растет производительность космических аппаратов. Практически все космические снимки поставляются в настоящее время с т.н. RPC коэффициентами, дающими достаточно точное внешнее ориентирование снимков. Это сильно упрощает фотограмметрическую обработку – добавление нового сенсора в современную ЦФС обычно не представляет существенных сложностей.
В области авиационных съемочных систем давно произошел переход на цифровые камеры. Использование емких носителей, идущих вместе с камерой, на борту самолете позволяет делать съемку с большими перекрытиями. Такая съемка увеличивает точность фотограмметрической обработки, позволяет строить точные плотные модели местности. Фотограмметрическая обработка съемки с большими перекрытиями принципиально не отличается от «стандартной» съемки аналоговыми камерами с 60% перекрытием вдоль маршрута.
Некоторые производители выпускают «особые» аэрокамеры, фотограмметрическая обработка которых сильно отличается от стандартной обработки. К таким камерам относятся, например, камеры серии ADS компании Leica Geosystems, камеры израильской компании VisionMap. В универсальных ЦФС не производится уравнивание залетов, сделанных такими камерами – они могут использовать результаты вычислений фотограмметрических программ, поставляемых с камерами для стереорисования, построения ЦМР или ортофото.
Для универсальных ЦФС, на наш взгляд, представляют интерес камеры производящие одновременно съемку и в надир и под углом к вертикали. К таким камерам относится среднеформатный аппарат Leica RC-30 Olique. Кадры такой камеры являются снимками центральной проекции, а геометрия съемки особая. Для фотограмметрической обработки такой съемки потребуется специальная доработка ЦФС – изменятся блоки поиска связующих точек и уравнивания. Камеры, снимающие не только в надир, но и под углом к надиру, позволяют получать 3х мерные модели местности с текстурами стен зданий.
Развитие компьютерной техники
Развитие компьютерной техники в значительной мере определяет развитие ЦФС. В последние годы рост производительности компьютерных систем достигается прежде всего за счет параллельных вычислений. Уже сейчас современный домашний компьютер содержит 2 или 4 процессорных ядра и может параллельно делать расчеты для 2х или 4х разных задач. Для рабочих станций давно уже выпускаются 6 ядерные процессоры. В современные домашние компьютеры устанавливают 4 или 8 гигабайт оперативной памяти, а в мощные рабочие станции может быть установлено 128 и более гигабайт. Использование больших объемов памяти возможно только в 64 разрядных операционных системах. В настоящее время идет переход от 32 разрядных к 64 разрядным ЦФС. 64 разрядные программы могут использовать большие объемы памяти на компьютере, что упрощает работу с большими объемами данных, делает работу с ними более комфортной. В ближайшее время ЦФС станут только 64 разрядными. Для повышения быстродействия на долгих операциях ЦФС должна использовать все ядра и все процессоры. Тут следует выделить два возможных технических подхода для распараллеливания трудоемких задач. Первый подход (т.н. распределенная обработка) заключается в независимых расчетах на всех ядрах, процессорах, основанный, например, на разбиении данных по отдельным снимкам, блокам снимков. Этот подход может использоваться для распараллеливания трудоемких процессов между рабочими станциями сети, или между «лезвиями» компьютерного кластера.
В современные домашние компьютеры устанавливают 4 или 8 гигабайт оперативной памяти, а в мощные рабочие станции может быть установлено 128 и более гигабайт. Использование больших объемов памяти возможно только в 64 разрядных операционных системах. В настоящее время идет переход от 32 разрядных к 64 разрядным ЦФС. 64 разрядные программы могут использовать большие объемы памяти на компьютере, что упрощает работу с большими объемами данных, делает работу с ними более комфортной. В ближайшее время ЦФС станут только 64 разрядными. Для повышения быстродействия на долгих операциях ЦФС должна использовать все ядра и все процессоры. Тут следует выделить два возможных технических подхода для распараллеливания трудоемких задач. Первый подход (т.н. распределенная обработка) заключается в независимых расчетах на всех ядрах, процессорах, основанный, например, на разбиении данных по отдельным снимкам, блокам снимков. Этот подход может использоваться для распараллеливания трудоемких процессов между рабочими станциями сети, или между «лезвиями» компьютерного кластера.
В настоящее время стоимость и энергопотребление компьютерных кластеров постоянно снижается. Фактически кластер начального уровня можно заказать в компьютерном магазине. Теперь не требуется специальное охлаждение или специальное электропитание для работы кластера начального уровня. Одно из направлений развития ЦФС – масштабируемая работа на компьютерном кластере или в сети предприятия, когда увеличение «лезвий» кластера или числа рабочих станций ведет к почти пропорциональному увеличению производительности и уменьшению времени расчетов.
Компьютерный кластер, предлагаемый одной из московских фирм
Второй подход к распараллеливанию заключается в разработке специальных алгоритмов для одновременного использования всех ядер одной рабочей станции. Первый тип распараллеливания называется в программировании многопроцессорными (multiprocessing) вычислениями, второй многопотоковыми (multithreading) вычислениями.
Еще одним способом ускорения трудоемких расчетов является использование спецвычислителей. Наиболее известными «ускорителями вычислений» до недавнего времени считались видео и специальные карты компании NVIDIA, поддерживающие технологию CUDA. Технология CUDA изначально разрабатывалась для 3х-мерных компьютерных игр. Однако оказалось, что с помощью этой технологии можно ускорить кодирование видео, разные алгоритмы обработки изображений и другие алгоритмы. С помощью спецвычислителей NVidia Tesla многие алгоритмы можно ускорить в несколько раз, а иногда и в несколько десятков раз. В конце 2012 года компанией Intel были выпущены спецвычислители Xeon Phi, представляющие из себя платы PCIx, после установки которых в компьютере появлялось несколько десятков ядер интеловской архитектуры. Это решение было названо MIC (Many Integrated Core). C помощью Intel Xeon Phi обычную рабочую станцию легко превратить в компьютерный кластер начального уровня. В отличии от технологии Cuda, архитектура MIC не требует специального программирования, ее могут использовать приложения написанные для многопроцессорной или многопоточной обработки.
Наиболее известными «ускорителями вычислений» до недавнего времени считались видео и специальные карты компании NVIDIA, поддерживающие технологию CUDA. Технология CUDA изначально разрабатывалась для 3х-мерных компьютерных игр. Однако оказалось, что с помощью этой технологии можно ускорить кодирование видео, разные алгоритмы обработки изображений и другие алгоритмы. С помощью спецвычислителей NVidia Tesla многие алгоритмы можно ускорить в несколько раз, а иногда и в несколько десятков раз. В конце 2012 года компанией Intel были выпущены спецвычислители Xeon Phi, представляющие из себя платы PCIx, после установки которых в компьютере появлялось несколько десятков ядер интеловской архитектуры. Это решение было названо MIC (Many Integrated Core). C помощью Intel Xeon Phi обычную рабочую станцию легко превратить в компьютерный кластер начального уровня. В отличии от технологии Cuda, архитектура MIC не требует специального программирования, ее могут использовать приложения написанные для многопроцессорной или многопоточной обработки.
Развитие алгоритмов
В последние годы курсы по фотограмметрии постепенно заменяются в ВУЗах на курсы по компьютерному зрению (Computer Vision). О близости этих двух дисциплин говорил на пленарном заседании XXII конгресса ISPR в Мельбурне профессор из Швейцарии Konrad Schindler, об этом же пишет в предисловии к 6-му изданию Manual of Photogrammetry (ASPRS, 2013) главный редактор О. Chris McGlone. В последние годы именно из компьютерного зрения в цифровую фотограмметрию приходят новые алгоритмы.
Несмотря на близость двух дисциплин, стоит отметить и различия между фотограмметрией и компьютерным зрением. От фотограмметрии требуется максимальная точность результата, для достижения этого специальные алгоритмы используют снимки громадных (с точки зрения компьютерного зрения) размеров. Компьютерное зрение решает обычно другие задачи.
В последние годы из Computer Vision в цифровую фотограмметрию пришли алгоритмы построения плотных моделей рельефа на основе минимизации глобальных функционалов, вычисляемых по всем снимкам, алгоритмы кросс-корреляции вытесняются детекторами особых точек и их дискрипторами.
Развитие компьютерных сетей
В последние годы сетевые технологии развиваются очень быстро. В крупных городах провайдеры предоставляют гигабитный доступ к сети интернет по вполне разумным ценам. Фактически скорость доступа в сети интернет сравнивается со скоростью локальной сети предприятия. Рассмотрим, как это может сказаться на развитии ЦФС.
Очень много сейчас разговоров об облаках, облачных сервисах и облачном хранении данных. Подходят ли эти технологии для ЦФС? Интересной видится следующая технология – пользователь закачивает свои данные в «облако», затем эти данные обрабатываются на «облачном кластере» в автоматическом режиме и пользователю остается только загрузить результат обработки.
Объем съемного носителя современной цифровой аэрокамеры измеряется в терабайтах. Общий объем снимков аэрозалета может составлять десятки терабайт. Несложно подсчитать время, требуемое для передачи такого объема данных по сети интернет в облако (из облака) при скорости 200 мегабит. Для передачи 1 Террабайта потребуется около 15 часов, а на один залет может уйти 1 или 2 недели. Это много. Несколько лучше обстоит ситуация со съемкой с БПЛА, в этом случае объем данных в несколько десятков раз меньше. Швейцарская компания Pix4D начала представлять сервис по облачной обработке съемки с БПЛА и столкнулась с проблемой секретности – многие потребители не хотели выгружать свои данные в облачный сервис, т.к не были уверены в отсутвии доступа посторонних лиц к данным съемки.
 В этом случае, на стороне пользователя ЦФС не требуется мощный компьютер. Все расчеты осуществляются на компьютерном кластере, расположенном в облаке. Пользователь выгружает данные в облако (на кластер), задает необходимые параметры обработки, вводит опорные данные, параметры камеры, осуществляет контроль обработки. Если необходимо, стерео векторизация может производиться со стороны клиента.
В этом случае, на стороне пользователя ЦФС не требуется мощный компьютер. Все расчеты осуществляются на компьютерном кластере, расположенном в облаке. Пользователь выгружает данные в облако (на кластер), задает необходимые параметры обработки, вводит опорные данные, параметры камеры, осуществляет контроль обработки. Если необходимо, стерео векторизация может производиться со стороны клиента.Выводы
С точки зрения развития съемочных сенсоров наибольшее влияние на развитие ЦФС могут оказать «наклонные» камеры, снимающие одновременно в надир и под углами к надиру.
 Это потребует доработки современных алгоритмов. ЦФС станут 64 битными, это позволит комфортно обрабатывать большие объемы данных. Применяемые на ЦФС алгоритмы будут многопоточными. Появятся кластерные решения, для автоматической обработки данных. Данные для кластеров можно будет выгружать с тонких клиентов, используемых для настройки автоматической обработки, стерео векторизации. Алгоритмы обработки будут развиваться в сторону автоматизации процессов, распознавания образов, автоматической векторизации зданий, дорог, мостов, 3D обработки. Произойдет интеграция ЦФС и геопорталов.
Это потребует доработки современных алгоритмов. ЦФС станут 64 битными, это позволит комфортно обрабатывать большие объемы данных. Применяемые на ЦФС алгоритмы будут многопоточными. Появятся кластерные решения, для автоматической обработки данных. Данные для кластеров можно будет выгружать с тонких клиентов, используемых для настройки автоматической обработки, стерео векторизации. Алгоритмы обработки будут развиваться в сторону автоматизации процессов, распознавания образов, автоматической векторизации зданий, дорог, мостов, 3D обработки. Произойдет интеграция ЦФС и геопорталов.Рубрики
Цифровая фотограмметрия охватывает теорию и практику опеределения формы, размеров, положения и типов объектов на плоскости и в пространстве по цифровым полутоновым изображениям на фотограмметрических проиборах, в которых для
%PDF-1.5 % 1 0 obj > /Metadata 2 0 R /Pages 3 0 R /StructTreeRoot 4 0 R /Type /Catalog >> endobj 5 0 obj /CreationDate (D:20131215140447+04’00’) /Creator /ModDate (D:20140428105107+04’00’) /Producer /Title >> endobj 2 0 obj > stream application/pdf
 32 841.92]
/Contents [88 0 R 89 0 R 90 0 R]
/Group >
/Tabs /S
/StructParents 0
/Annots [91 0 R]
>>
endobj
7 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
>>
/StructParents 1
/Tabs /S
/Type /Page
>>
endobj
8 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
>>
/StructParents 2
/Tabs /S
/Type /Page
>>
endobj
9 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
>>
/StructParents 3
/Tabs /S
/Type /Page
>>
endobj
10 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 4
/Tabs /S
/Type /Page
>>
endobj
11 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 5
/Tabs /S
/Type /Page
>>
endobj
12 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 6
/Tabs /S
/Type /Page
>>
endobj
13 0 obj
>
/MediaBox [0 0 595.
32 841.92]
/Contents [88 0 R 89 0 R 90 0 R]
/Group >
/Tabs /S
/StructParents 0
/Annots [91 0 R]
>>
endobj
7 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
>>
/StructParents 1
/Tabs /S
/Type /Page
>>
endobj
8 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
>>
/StructParents 2
/Tabs /S
/Type /Page
>>
endobj
9 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
>>
/StructParents 3
/Tabs /S
/Type /Page
>>
endobj
10 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 4
/Tabs /S
/Type /Page
>>
endobj
11 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 5
/Tabs /S
/Type /Page
>>
endobj
12 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 6
/Tabs /S
/Type /Page
>>
endobj
13 0 obj
>
/MediaBox [0 0 595. 32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 7
/Tabs /S
/Type /Page
>>
endobj
14 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 8
/Tabs /S
/Type /Page
>>
endobj
15 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 9
/Tabs /S
/Type /Page
>>
endobj
16 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 178 0 R
/Group >
/Tabs /S
/StructParents 10
>>
endobj
17 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 194 0 R
/Group >
/Tabs /S
/StructParents 11
>>
endobj
18 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 213 0 R
/Group >
/Tabs /S
/StructParents 12
>>
endobj
19 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.
32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 7
/Tabs /S
/Type /Page
>>
endobj
14 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 8
/Tabs /S
/Type /Page
>>
endobj
15 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 9
/Tabs /S
/Type /Page
>>
endobj
16 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 178 0 R
/Group >
/Tabs /S
/StructParents 10
>>
endobj
17 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 194 0 R
/Group >
/Tabs /S
/StructParents 11
>>
endobj
18 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 213 0 R
/Group >
/Tabs /S
/StructParents 12
>>
endobj
19 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595. 32 841.92]
/Contents 225 0 R
/Group >
/Tabs /S
/StructParents 13
>>
endobj
20 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 241 0 R
/Group >
/Tabs /S
/StructParents 14
>>
endobj
21 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 251 0 R
/Group >
/Tabs /S
/StructParents 15
>>
endobj
22 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 261 0 R
/Group >
/Tabs /S
/StructParents 16
>>
endobj
23 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 269 0 R
/Group >
/Tabs /S
/StructParents 17
>>
endobj
24 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 278 0 R
/Group >
/Tabs /S
/StructParents 18
>>
endobj
25 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.
32 841.92]
/Contents 225 0 R
/Group >
/Tabs /S
/StructParents 13
>>
endobj
20 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 241 0 R
/Group >
/Tabs /S
/StructParents 14
>>
endobj
21 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 251 0 R
/Group >
/Tabs /S
/StructParents 15
>>
endobj
22 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 261 0 R
/Group >
/Tabs /S
/StructParents 16
>>
endobj
23 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 269 0 R
/Group >
/Tabs /S
/StructParents 17
>>
endobj
24 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 278 0 R
/Group >
/Tabs /S
/StructParents 18
>>
endobj
25 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595. 32 841.92]
/Contents 293 0 R
/Group >
/Tabs /S
/StructParents 19
>>
endobj
26 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 324 0 R
/Group >
/Tabs /S
/StructParents 20
>>
endobj
27 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 339 0 R
/Group >
/Tabs /S
/StructParents 21
>>
endobj
28 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 356 0 R
/Group >
/Tabs /S
/StructParents 22
>>
endobj
29 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 369 0 R
/Group >
/Tabs /S
/StructParents 23
>>
endobj
30 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 381 0 R
/Group >
/Tabs /S
/StructParents 24
>>
endobj
31 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.
32 841.92]
/Contents 293 0 R
/Group >
/Tabs /S
/StructParents 19
>>
endobj
26 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 324 0 R
/Group >
/Tabs /S
/StructParents 20
>>
endobj
27 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 339 0 R
/Group >
/Tabs /S
/StructParents 21
>>
endobj
28 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 356 0 R
/Group >
/Tabs /S
/StructParents 22
>>
endobj
29 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 369 0 R
/Group >
/Tabs /S
/StructParents 23
>>
endobj
30 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 381 0 R
/Group >
/Tabs /S
/StructParents 24
>>
endobj
31 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595. 32 841.92]
/Contents 383 0 R
/Group >
/Tabs /S
/StructParents 25
>>
endobj
32 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 384 0 R
/Group >
/Tabs /S
/StructParents 26
>>
endobj
33 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 385 0 R
/Group >
/Tabs /S
/StructParents 27
>>
endobj
34 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 407 0 R
/Group >
/Tabs /S
/StructParents 28
>>
endobj
35 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 418 0 R
/Group >
/Tabs /S
/StructParents 29
>>
endobj
36 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 428 0 R
/Group >
/Tabs /S
/StructParents 30
>>
endobj
37 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.
32 841.92]
/Contents 383 0 R
/Group >
/Tabs /S
/StructParents 25
>>
endobj
32 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 384 0 R
/Group >
/Tabs /S
/StructParents 26
>>
endobj
33 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 385 0 R
/Group >
/Tabs /S
/StructParents 27
>>
endobj
34 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 407 0 R
/Group >
/Tabs /S
/StructParents 28
>>
endobj
35 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 418 0 R
/Group >
/Tabs /S
/StructParents 29
>>
endobj
36 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 428 0 R
/Group >
/Tabs /S
/StructParents 30
>>
endobj
37 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595. 32 841.92]
/Contents 434 0 R
/Group >
/Tabs /S
/StructParents 31
>>
endobj
38 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 447 0 R
/Group >
/Tabs /S
/StructParents 32
>>
endobj
39 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 451 0 R
/Group >
/Tabs /S
/StructParents 33
>>
endobj
40 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 452 0 R
/Group >
/Tabs /S
/StructParents 34
>>
endobj
41 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 455 0 R
/Group >
/Tabs /S
/StructParents 35
>>
endobj
42 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 460 0 R
/Group >
/Tabs /S
/StructParents 36
>>
endobj
43 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.
32 841.92]
/Contents 434 0 R
/Group >
/Tabs /S
/StructParents 31
>>
endobj
38 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 447 0 R
/Group >
/Tabs /S
/StructParents 32
>>
endobj
39 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 451 0 R
/Group >
/Tabs /S
/StructParents 33
>>
endobj
40 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 452 0 R
/Group >
/Tabs /S
/StructParents 34
>>
endobj
41 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 455 0 R
/Group >
/Tabs /S
/StructParents 35
>>
endobj
42 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 460 0 R
/Group >
/Tabs /S
/StructParents 36
>>
endobj
43 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595. 32 841.92]
/Contents 484 0 R
/Group >
/Tabs /S
/StructParents 37
>>
endobj
44 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 502 0 R
/Group >
/Tabs /S
/StructParents 38
>>
endobj
45 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 519 0 R
/Group >
/Tabs /S
/StructParents 39
>>
endobj
46 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 534 0 R
/Group >
/Tabs /S
/StructParents 40
>>
endobj
47 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 554 0 R
/Group >
/Tabs /S
/StructParents 41
>>
endobj
48 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 567 0 R
/Group >
/Tabs /S
/StructParents 42
>>
endobj
49 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.
32 841.92]
/Contents 484 0 R
/Group >
/Tabs /S
/StructParents 37
>>
endobj
44 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 502 0 R
/Group >
/Tabs /S
/StructParents 38
>>
endobj
45 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 519 0 R
/Group >
/Tabs /S
/StructParents 39
>>
endobj
46 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 534 0 R
/Group >
/Tabs /S
/StructParents 40
>>
endobj
47 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 554 0 R
/Group >
/Tabs /S
/StructParents 41
>>
endobj
48 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 567 0 R
/Group >
/Tabs /S
/StructParents 42
>>
endobj
49 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595. 32 841.92]
/Contents 612 0 R
/Group >
/Tabs /S
/StructParents 43
>>
endobj
50 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 623 0 R
/Group >
/Tabs /S
/StructParents 44
>>
endobj
51 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 634 0 R
/Group >
/Tabs /S
/StructParents 45
>>
endobj
52 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 657 0 R
/Group >
/Tabs /S
/StructParents 46
>>
endobj
53 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 694 0 R
/Group >
/Tabs /S
/StructParents 47
>>
endobj
54 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 744 0 R
/Group >
/Tabs /S
/StructParents 48
>>
endobj
55 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.
32 841.92]
/Contents 612 0 R
/Group >
/Tabs /S
/StructParents 43
>>
endobj
50 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 623 0 R
/Group >
/Tabs /S
/StructParents 44
>>
endobj
51 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 634 0 R
/Group >
/Tabs /S
/StructParents 45
>>
endobj
52 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 657 0 R
/Group >
/Tabs /S
/StructParents 46
>>
endobj
53 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 694 0 R
/Group >
/Tabs /S
/StructParents 47
>>
endobj
54 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 744 0 R
/Group >
/Tabs /S
/StructParents 48
>>
endobj
55 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595. 32 841.92]
/Contents 757 0 R
/Group >
/Tabs /S
/StructParents 49
>>
endobj
56 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 50
/Tabs /S
/Type /Page
>>
endobj
57 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 792 0 R
/Group >
/Tabs /S
/StructParents 51
>>
endobj
58 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 831 0 R
/Group >
/Tabs /S
/StructParents 52
>>
endobj
59 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 858 0 R
/Group >
/Tabs /S
/StructParents 53
>>
endobj
60 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 863 0 R
/Group >
/Tabs /S
/StructParents 54
>>
endobj
61 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.
32 841.92]
/Contents 757 0 R
/Group >
/Tabs /S
/StructParents 49
>>
endobj
56 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 50
/Tabs /S
/Type /Page
>>
endobj
57 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 792 0 R
/Group >
/Tabs /S
/StructParents 51
>>
endobj
58 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 831 0 R
/Group >
/Tabs /S
/StructParents 52
>>
endobj
59 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 858 0 R
/Group >
/Tabs /S
/StructParents 53
>>
endobj
60 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 863 0 R
/Group >
/Tabs /S
/StructParents 54
>>
endobj
61 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595. 32 841.92]
/Contents 866 0 R
/Group >
/Tabs /S
/StructParents 55
>>
endobj
62 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 878 0 R
/Group >
/Tabs /S
/StructParents 56
>>
endobj
63 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 879 0 R
/Group >
/Tabs /S
/StructParents 57
>>
endobj
64 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 885 0 R
/Group >
/Tabs /S
/StructParents 58
>>
endobj
65 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 888 0 R
/Group >
/Tabs /S
/StructParents 59
>>
endobj
66 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 903 0 R
/Group >
/Tabs /S
/StructParents 60
>>
endobj
67 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.
32 841.92]
/Contents 866 0 R
/Group >
/Tabs /S
/StructParents 55
>>
endobj
62 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 878 0 R
/Group >
/Tabs /S
/StructParents 56
>>
endobj
63 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 879 0 R
/Group >
/Tabs /S
/StructParents 57
>>
endobj
64 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 885 0 R
/Group >
/Tabs /S
/StructParents 58
>>
endobj
65 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 888 0 R
/Group >
/Tabs /S
/StructParents 59
>>
endobj
66 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 903 0 R
/Group >
/Tabs /S
/StructParents 60
>>
endobj
67 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595. 32 841.92]
/Contents 919 0 R
/Group >
/Tabs /S
/StructParents 61
>>
endobj
68 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 932 0 R
/Group >
/Tabs /S
/StructParents 62
>>
endobj
69 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 933 0 R
/Group >
/Tabs /S
/StructParents 63
>>
endobj
70 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 939 0 R
/Group >
/Tabs /S
/StructParents 64
>>
endobj
71 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 940 0 R
/Group >
/Tabs /S
/StructParents 65
>>
endobj
72 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 957 0 R
/Group >
/Tabs /S
/StructParents 66
>>
endobj
73 0 obj
>
/MediaBox [0 0 841.
32 841.92]
/Contents 919 0 R
/Group >
/Tabs /S
/StructParents 61
>>
endobj
68 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 932 0 R
/Group >
/Tabs /S
/StructParents 62
>>
endobj
69 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 933 0 R
/Group >
/Tabs /S
/StructParents 63
>>
endobj
70 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 939 0 R
/Group >
/Tabs /S
/StructParents 64
>>
endobj
71 0 obj
>
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 940 0 R
/Group >
/Tabs /S
/StructParents 65
>>
endobj
72 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 957 0 R
/Group >
/Tabs /S
/StructParents 66
>>
endobj
73 0 obj
>
/MediaBox [0 0 841. 92 595.32]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 67
/Tabs /S
/Type /Page
>>
endobj
74 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 979 0 R
/Group >
/Tabs /S
/StructParents 68
>>
endobj
75 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 69
/Tabs /S
/Type /Page
>>
endobj
76 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 1011 0 R
/Group >
/Tabs /S
/StructParents 70
>>
endobj
77 0 obj
>
endobj
78 0 obj
>
endobj
79 0 obj
>
endobj
80 0 obj
>
endobj
81 0 obj
>
endobj
82 0 obj
>
endobj
83 0 obj
>
endobj
84 0 obj
>
endobj
85 0 obj
>
endobj
86 0 obj
>
endobj
87 0 obj
>
stream
x
92 595.32]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 67
/Tabs /S
/Type /Page
>>
endobj
74 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 979 0 R
/Group >
/Tabs /S
/StructParents 68
>>
endobj
75 0 obj
>
/MediaBox [0 0 595.32 841.92]
/Parent 3 0 R
/Resources >
/ProcSet [/PDF /Text]
/XObject >
>>
/StructParents 69
/Tabs /S
/Type /Page
>>
endobj
76 0 obj
>
/XObject >
/ProcSet [/PDF /Text /ImageB /ImageC /ImageI]
>>
/MediaBox [0 0 595.32 841.92]
/Contents 1011 0 R
/Group >
/Tabs /S
/StructParents 70
>>
endobj
77 0 obj
>
endobj
78 0 obj
>
endobj
79 0 obj
>
endobj
80 0 obj
>
endobj
81 0 obj
>
endobj
82 0 obj
>
endobj
83 0 obj
>
endobj
84 0 obj
>
endobj
85 0 obj
>
endobj
86 0 obj
>
endobj
87 0 obj
>
stream
x5 Теория и приложения цифровой фотограмметрии
Так что же такое цифровая фотограмметрия? Это использование искусства, науки и технологий для измерения данных и получения высоконадежной информации об объектах и окружающей среде, в которой они находятся.
Почему так важно, чтобы 3D-сканы имели такое высокое разрешение? Их можно легко использовать на производстве для разборки определенных машин на экране, чтобы ограничить время, затрачиваемое на разборку реальной машины. Анализ деформации — это экономичный и простой способ просмотреть старые конструкции, переставить части системы, модифицировать оборудование и многое другое. Трехмерные координатно-измерительные системы имеют технологию сбора данных за считанные секунды, что не только экономит деньги вашей компании, но и экономит время.
С помощью лазеров, линз и датчиков фотограмметрические снимки могут выявить непредвиденные недостатки или выявить более простые способы работы, чтобы сделать производство и производство более эффективным. Одна камера может собирать миллионы точек данных, которые затем можно превратить в полезную информацию для исследователей, техников, медицинских экспертов и других лиц. Камера работает, делая снимки под разными углами, а затем программное обеспечение размещает их на трехмерной координатной плоскости для анализа. Хотя камере не нужно поддерживать точное положение, важно, чтобы камера была высокого качества для получения наиболее существенных результатов.
Хотя камере не нужно поддерживать точное положение, важно, чтобы камера была высокого качества для получения наиболее существенных результатов.
Когда результаты ясны, производителям и исследователям намного проще работать с масштабируемыми оцифрованными данными. Сканирование физических объектов для преобразования информации в пригодные для использования данные избавляет от необходимости проводить исследования ограниченного количества объектов в условиях ограниченного времени.
Понимание теории и приложений цифровой фотограмметрии поможет вам лучше решить, какой тип 3D-продуктов повысит производительность вашего бизнеса. В этой части мы рассмотрим 5 тем, чтобы помочь вам понять основную теорию и приложения, связанные с цифровой фотограмметрией.
#1 Триангуляция
Допустим, вы читаете это на своем ноутбуке. Если вы смотрите на свой ноутбук, вы знаете, что он находится прямо перед вами. Если вы закроете правый глаз, а затем закроете левый глаз, вы заметите, что ноутбук сдвинулся. Эта идея похожа на «линии взгляда», которые создают трехмерный эффект отсканированного 3D-изображения. Это происходит путем фотографирования под разными углами, а затем их наложения на плоскости. Затем 2D-изображения могут объединяться в 3D-изображение, которое дает вам более полное представление об изучаемом объекте.
Эта идея похожа на «линии взгляда», которые создают трехмерный эффект отсканированного 3D-изображения. Это происходит путем фотографирования под разными углами, а затем их наложения на плоскости. Затем 2D-изображения могут объединяться в 3D-изображение, которое дает вам более полное представление об изучаемом объекте.
Полоса полета #2
Фотограмметрические изображения делаются в виде серии параллельных проходов. На объекте будут точки данных, которые улавливает объектив камеры. Камера фиксирует эти точки данных в немного разных видах вокруг объекта, пока 3D-изображения не будут объединены воедино. Из-за того, как работает экспозиция камеры, каждое изображение будет немного перекрываться предыдущим изображением.
#3 Автомобильная фотограмметрия
Чтобы оставаться впереди конкурентов и ускорить разработку и производство автомобилей, производители используют 3D-сканирование и фотограмметрию. Вместо того, чтобы экспериментировать с физическими деталями, они могут разбирать, осматривать и анализировать на экране, чтобы сэкономить время и деньги при производстве транспортных средств.
Создание глиняных моделей стало проще, чем когда-либо прежде, потому что их можно формировать непосредственно из данных сканирования на экране. Фотограмметрические изображения, преобразованные в 3D-сканы, позволяют техническим специалистам улучшить качество своей продукции, поскольку они могут использовать вычислительный гидродинамический анализ для уменьшения шума ветра и проверки аэродинамического сопротивления и прижимной силы. Они также могут использовать изображения для сравнения отсканированных моделей с CAD-моделями, чтобы сократить количество итераций, необходимых для получения конечного продукта.
Цифровая фотограмметрия охватывает не только внешнюю сторону объекта. Если каждый объект сканируется на части, цифровая сборка может происходить на экране, чтобы гарантировать, что компоненты подходят друг к другу. Окончательные детали также могут быть скорректированы.
#4 Медицинские исследования
Почти так же, как автомобили можно разобрать для осмотра или собрать для пробной подгонки, внутреннюю анатомию человека также можно сканировать на части.
Судебная экспертиза, тематические исследования и медицинские исследования могут извлечь пользу из цифровой фотограмметрии. Могут быть собраны изображения с высоким разрешением, такие как слепки зубов и отпечатки пальцев, могут быть созданы модели CAD, а информация может быть заархивирована в состоянии «как изготовлено». Возможность измерять данные из тонких, детализированных мелких деталей означает, что исследования и анализ становятся еще более точными.
Медицина использует теорию и приложения цифровой фотограмметрии для расширения своих знаний о человеческом теле. Таким образом, они могут более эффективно находить недостатки в таких вещах, как имплантаты, или модифицировать то, как врачи проводят определенные операции.
В другой области криминалисты используют 3D-сканирование и фотограмметрию TRITOP для сравнения сканирований с моделями САПР в случае аварий. Например, после автомобильной аварии можно сделать 3D-сканирование столкновения и сравнить автомобиль с исходной моделью, чтобы определить скорость столкновения или несоответствие, которое может выявить технические проблемы, которые могли привести к неисправности автомобиля или транспортного средства.
#5 Литье и ковка
Производители постоянно ищут новые способы изготовления отливок, максимально приближенных к форме сетки. Более подробные и точные сканирования также означают, что отливки и формы будут ближе соответствовать более строгим требованиям к допускам. Метрологические решения, сочетающие 3D-сканирование с фотограмметрией, позволяют более полно воссоздать отливки, поддерживающие создание моделей САПР, и могут быть заархивированы в состоянии «как изготовлено».
Для деталей со сложными деталями 3D-сканирование использует технологию синего света для воспроизведения изображений невероятно высокой четкости. Измеряются сложные геометрические формы, и в результате требуется создавать меньше итераций. Полезной особенностью 3D-сканеров является то, что они могут адаптироваться к различным размерам измерений. Можно сканировать как маленькие, так и большие тома, и изображения для обоих будут соответствовать одним и тем же требованиям к высокому разрешению.
После архивирования скана «как изготовлено» можно сравнить отливку или форму с 2D-чертежем для контрольного анализа. Если возникают проблемы или неточности, анализ первопричины позволяет прочитать цветовую карту отсканированного объекта, чтобы выявить проблему в процессе производства. Оттуда вы можете дополнить производственный процесс, улучшив характеристики продукта на основе внесения исправлений или улучшений. Интеллектуальные технологии в программном обеспечении для сканирования могут помочь вам определить, где лучше всего внести улучшения, чтобы оптимизировать рабочий процесс и повысить производительность.
Если возникают проблемы или неточности, анализ первопричины позволяет прочитать цветовую карту отсканированного объекта, чтобы выявить проблему в процессе производства. Оттуда вы можете дополнить производственный процесс, улучшив характеристики продукта на основе внесения исправлений или улучшений. Интеллектуальные технологии в программном обеспечении для сканирования могут помочь вам определить, где лучше всего внести улучшения, чтобы оптимизировать рабочий процесс и повысить производительность.
Хотите узнать больше? Свяжитесь с нами сегодня!
Нужна дополнительная информация? Посетите нашу страницу фотограмметрии прямо сейчас! Вы сможете просматривать наши различные продукты, такие как GOM TRITOP или ATOS Plus, надстройка, которая интуитивно интегрирует цифровую фотограмметрию с ATOS Triple Scan или ATOS Core, которые собирают 3D-измерения с помощью нашей технологии синего света. .
Если у вас все еще остается вопрос, что такое цифровая фотограмметрия, или если вам интересно, как ваше производственное предприятие может извлечь выгоду из спецификаций теории и применения цифровой фотограмметрии, свяжитесь с нами! Наша цель в Capture 3D — помочь улучшить ваш рабочий процесс и позволить вам извлечь выгоду из лучших продуктов, которые вы можете предложить своим клиентам. Независимо от того, работаете ли вы в области, которая не была упомянута, или вам интересно, как вы можете внедрить аппаратное и программное обеспечение для цифровой фотограмметрии и 3D-сканирования в свои повседневные производственные процессы, мы поможем вам.
Независимо от того, работаете ли вы в области, которая не была упомянута, или вам интересно, как вы можете внедрить аппаратное и программное обеспечение для цифровой фотограмметрии и 3D-сканирования в свои повседневные производственные процессы, мы поможем вам.
Цифровая фотограмметрия
Цифровая фотограмметрия Эрик ТейтGRG 394: Исследования в области дистанционного зондирования
11 декабря 1998 г.
[email protected]
ПРИМЕНЕНИЕ ФОТОГРАММЕТРИИ В
ЦИФРОВОЕ МОДЕЛИРОВАНИЕ РЕЗИНЫ И КАРТИРОВАНИЕ ПОПОЙМЫ
Содержание:
- Введение
- Разработка данных
- Получение изображения
- Стереоскопический параллакс
- Разработка цифровой модели местности
- Цифровые ортофотографии
- Исследовательские приложения
- Двумерное картографирование поймы
- Трехмерная визуализация поймы
- Выводы
- Ссылки
Введение
Для моего исследования магистра в области гражданского строительства я разрабатываю
процедуры подключения выходных данных гидравлического моделирования к географическим информационным системам
(ГИС). Когда подход будет завершен, инженер-гидротехник должен быть в состоянии принять
набор профилей водной поверхности, рассчитанных с помощью гидравлического моделирования, и нанести на карту
связанная пойма в ГИС. В ходе своего исследования я обнаружил
что важным компонентом картографирования поймы ГИС является построение точного
цифровое представление рельефа изучаемой территории Уоллер-Крик. Важный вклад в
цифровое представление местности – это цифровые ортофотографии и цифровая местность
модели. Методы, используемые для обработки этих данных, основаны на принципах фотограмметрии.
Когда подход будет завершен, инженер-гидротехник должен быть в состоянии принять
набор профилей водной поверхности, рассчитанных с помощью гидравлического моделирования, и нанести на карту
связанная пойма в ГИС. В ходе своего исследования я обнаружил
что важным компонентом картографирования поймы ГИС является построение точного
цифровое представление рельефа изучаемой территории Уоллер-Крик. Важный вклад в
цифровое представление местности – это цифровые ортофотографии и цифровая местность
модели. Методы, используемые для обработки этих данных, основаны на принципах фотограмметрии.
Фотограмметрия определяется как наука или искусство получения
надежные измерения с помощью фотографии (Томпсон, 1966). Хотя термин
может применяться для измерений по наземным фотографиям, современным фотограмметрическим методам
чаще всего применяются к аэрофотоснимкам и космическим снимкам. Одно из самых распространенных применений
фотограмметрии – это анализ аэрофотоснимков для извлечения рельефа местности. для изготовления топографических карт. Тем не менее, область также включает в себя производство
цифровых ортофотографий и цифровых моделей местности. Эта статья посвящена
процедуры, используемые для разработки этих цифровых данных и их применения в моих исследованиях.
для изготовления топографических карт. Тем не менее, область также включает в себя производство
цифровых ортофотографий и цифровых моделей местности. Эта статья посвящена
процедуры, используемые для разработки этих цифровых данных и их применения в моих исследованиях.
Первая половина статьи посвящена фотограмметрическому методы, используемые для создания цифровых ортофотографий и цифровых моделей местности. Рассматриваемые темы включают получение изображений, стереоскопический параллакс, цифровой ландшафт. разработка моделей и цифровые ортофотографии.
Получение изображения
Первый шаг в производстве цифровой ортофотографии и
Модели местности делают аэрофотоснимки поверхности земли. Чтобы приобрести
изображений, самолет летит над изучаемой территорией по прямой линии полета, и фотографирует
сделаны таким образом, чтобы каждая наземная точка появлялась не менее чем на двух последовательных фотографиях. Полученные фотографии называются стереопарой, а область общего охвата называется
перекрывать. Если интересующая область исследования требует более одной линии полета для полного
покрытие, дополнительные линии полета проходят параллельно исходной линии. Перекрывать
между соседними линиями полета называется боковым перекрытием и используется для предотвращения пробелов в покрытии.
Стандартное перекрытие составляет 60 % вперед и 15 % сбоку (рис. 1).
Полученные фотографии называются стереопарой, а область общего охвата называется
перекрывать. Если интересующая область исследования требует более одной линии полета для полного
покрытие, дополнительные линии полета проходят параллельно исходной линии. Перекрывать
между соседними линиями полета называется боковым перекрытием и используется для предотвращения пробелов в покрытии.
Стандартное перекрытие составляет 60 % вперед и 15 % сбоку (рис. 1).
Рисунок 1. Покрытие изображения с использованием перекрывающихся фотографий
Рисунок 2. Пример растрового цифрового изображения
Как правило, аэрофотоснимки, предназначенные для производства цифровых ортофотопланов, снято камерой с объективом с фокусным расстоянием 6 дюймов на высоте 15 000 футов; при этом создаются фотографии в масштабе 1:30 000. Пленки диапозитивы (прозрачные пленки) позже сканируются с помощью высокоточного сканера изображений для создания файла цифрового растрового изображения. Хотя результирующие растровые изображения кажутся непрерывными, на самом деле они состоят
сетки дискретных квадратных ячеек одинакового размера.
Хотя результирующие растровые изображения кажутся непрерывными, на самом деле они состоят
сетки дискретных квадратных ячеек одинакового размера.Каждой ячейке или пикселю присваивается значение шкалы серого, соответствующее к средней интенсивности площади земли, покрываемой пикселем (Lillesand, 1994). На рис. 2 показано, как может выглядеть растровое цифровое изображение, если оно отображается в виде значений шкалы серого. По мере увеличения разрешения отсканированного изображения требуется увеличение, чтобы различить отдельные пиксели невооруженным глазом.
Стереоскопический параллакс
Методы визуальной оценки глубины можно классифицировать как
стереоскопический или моноскопический (Волк, 19 лет)74). Моноскопическое зрение относится к просмотру окружающего
предметы одним глазом. Глубина воспринимается в первую очередь на основе относительных размеров
объекты и скрытые объекты; удаленные объекты кажутся меньше и позади более близких объектов. Однако при моноскопическом зрении восприятие глубины плохое, и оценка расстояния может быть затруднена.
трудный. При стереоскопическом зрении объекты рассматриваются обоими глазами, что создает комбинированное изображение.
трехмерное изображение. Стереоскопическое зрение позволяет увидеть гораздо большую глубину
восприятия, чем моноскопическое зрение. Концепция стереоскопического зрения также может применяться к
просмотр стереопары аэрофотосъемки. Просмотр левой фотографии левым глазом
а правильная фотография правым глазом, трехмерный вид местности может быть
получено (Лиллесанд, 1994). В этом помогает прибор под названием стереоскоп.
тип визуализации. Многие люди найдут стереоскопический просмотр аэрофотосъемки
без стереоскопа быть довольно сложной задачей.
Однако при моноскопическом зрении восприятие глубины плохое, и оценка расстояния может быть затруднена.
трудный. При стереоскопическом зрении объекты рассматриваются обоими глазами, что создает комбинированное изображение.
трехмерное изображение. Стереоскопическое зрение позволяет увидеть гораздо большую глубину
восприятия, чем моноскопическое зрение. Концепция стереоскопического зрения также может применяться к
просмотр стереопары аэрофотосъемки. Просмотр левой фотографии левым глазом
а правильная фотография правым глазом, трехмерный вид местности может быть
получено (Лиллесанд, 1994). В этом помогает прибор под названием стереоскоп.
тип визуализации. Многие люди найдут стереоскопический просмотр аэрофотосъемки
без стереоскопа быть довольно сложной задачей.
Параллакс – кажущееся смещение в положении стационарного
объект по отношению к системе отсчета, вызванный сдвигом положения
наблюдения (Wolf, 1974). Если объект наблюдается моноскопически левым глазом и
затем вправо, есть очевидный сдвиг в положении. Так как расстояние между
наблюдателя и объекта уменьшается, видимое смещение положения увеличивается. Инструмент под названием
стереометр используется для измерения различий в параллаксе между объектами в стереопаре.
Затем можно использовать уравнения параллакса для преобразования измеренного параллакса в высоту объекта.
Так как расстояние между
наблюдателя и объекта уменьшается, видимое смещение положения увеличивается. Инструмент под названием
стереометр используется для измерения различий в параллаксе между объектами в стереопаре.
Затем можно использовать уравнения параллакса для преобразования измеренного параллакса в высоту объекта.
На основании приведенных выше определений стереоскопического зрения и параллакса, термин стереоскопический параллакс относится к восприятию глубины, основанному на просмотре объектов с отдельные точки наблюдения. Стереоскопический параллакс является очень важным понятием в фотограмметрии, потому что она позволяет измерять высоту объектов, образующих стереопару.
Разработка цифровой модели местности
Модель поверхности местности может быть разработана с использованием аналогового прибора
называется стереоплоттер. В основном стереоплоттеры используются для создания топографических изображений. карты. Типичный стереоплоттер состоит из компонентов для световой проекции, стереопары
просмотр и отслеживание особенностей рельефа:
карты. Типичный стереоплоттер состоит из компонентов для световой проекции, стереопары
просмотр и отслеживание особенностей рельефа:
- Проекционная система . Стеклянные диапозитивы стереопары размещены в проекторе и освещенном светом сверху.
- Система просмотра . Пользователь просматривает стереопару через стереоскоп очки. Обычно одна линза синяя, а другая красная. Система просмотра позволяет стереомодель для просмотра в трех измерениях.
- Система измерения и отслеживания . Свет проходит через проектор на трассировочная таблица. В центре таблицы для трассировки находится небольшое отверстие, через которое проходит небольшой луч света, который выглядит как плавающая точка (Эйвери, 19 лет).92).
Чтобы построить положение заданной точки, таблица трассировки поднимается
или опускаться до тех пор, пока точка не окажется на земле. Наземные контрольные точки (x,y,z)
установленные на основе наземной съемки или аэротриангуляции, просматриваются на стереоплоттере
совместно со стереопарой.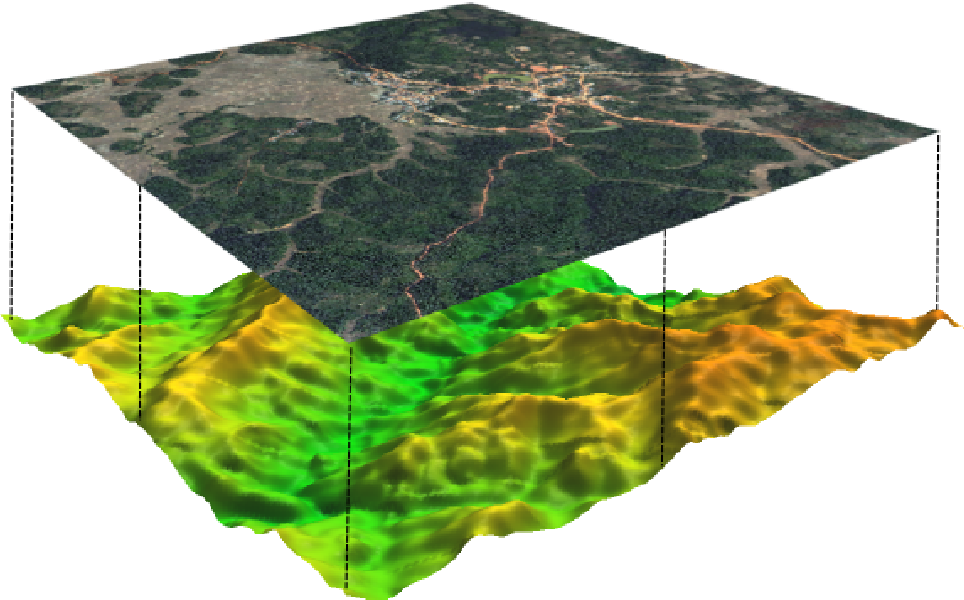 В этой настройке координаты изображения (x, y, z)
точки в стереопаре определяются, случайным образом выбираются и записываются.
В этой настройке координаты изображения (x, y, z)
точки в стереопаре определяются, случайным образом выбираются и записываются.
Описанный выше стереоплоттер является аналоговым инструментом. Большинство сегодня фотограмметристы вместо этого используют программное обеспечение для цифровой обработки изображений для извлечения рельефа. высот с аэрофотосъемки. Тем не менее, процесс извлечения точек очень похож, за тем заметным исключением, что стереопара просматривается в компьютере как отсканированный растр изображение. Используя программное обеспечение для обработки, фотограмметрист выбирает и оцифровывает высокое плотность точек. Координаты выбранного изображения в сочетании с наземным управлением точки, содержат точки данных, используемые для построения цифровой модели местности.
Модель треугольной неправильной сети (TIN) обычно используется для
цифровое представление поверхности местности. TIN представляет собой треугольную сетку, построенную
на (x, y) местах набора точек данных. Для формирования ИНН периметр вокруг
сначала устанавливаются точки данных, называемые выпуклой оболочкой. Для подключения интерьера
точки, треугольники создаются со всеми внутренними углами как можно ближе к равноугольным.
Эта процедура называется триангуляцией Делоне. Включая измерение высоты
(z) для каждой вершины треугольника треугольники можно поднимать и наклонять, образуя плоскость.
Совокупность всех таких треугольных плоскостей образует представление о поверхности земли.
местности с высокой степенью детализации.
Для формирования ИНН периметр вокруг
сначала устанавливаются точки данных, называемые выпуклой оболочкой. Для подключения интерьера
точки, треугольники создаются со всеми внутренними углами как можно ближе к равноугольным.
Эта процедура называется триангуляцией Делоне. Включая измерение высоты
(z) для каждой вершины треугольника треугольники можно поднимать и наклонять, образуя плоскость.
Совокупность всех таких треугольных плоскостей образует представление о поверхности земли.
местности с высокой степенью детализации.
Рисунок 3. Представление поверхности треугольной неправильной сети
Дополнительные данные о высотах, такие как точечные отметки на вершинах и впадины и линии разрыва также могут быть включены в модель TIN. Линии разрыва представляют значительные особенности местности, такие как озеро или скала, которые вызывают изменение уклона; БАНКА треугольники не пересекают линии разрыва.
Точки высот, извлеченные из стереомодели, также могут быть
используется для создания растровой (сетчатой) модели высот местности. Представление поверхности земли
в растровой области называется цифровой моделью рельефа (ЦМР). Однако модель ИНН
обычно предпочтительнее для трехмерного представления поверхности, потому что TIN
требует гораздо меньшего количества точек, чем сетка, чтобы представить
рельеф местности с одинаковой точностью.
Представление поверхности земли
в растровой области называется цифровой моделью рельефа (ЦМР). Однако модель ИНН
обычно предпочтительнее для трехмерного представления поверхности, потому что TIN
требует гораздо меньшего количества точек, чем сетка, чтобы представить
рельеф местности с одинаковой точностью.
Цифровые ортофотографии
Цифровые ортофотоснимки представляют собой аэрофотоснимки с правильным масштабом. Общепринятый
аэрофотоснимки имеют ограниченное применение для проведения измерений, поскольку они не соответствуют действительности.
шкала. Когда вы смотрите в центр аэрофотоснимка, вид такой же, как если бы
глядя прямо вниз с самолета. Однако вид на землю по краям
фото сделано под углом. Это называется центральной перспективной проекцией; шкала
верно в самом центре аэрофотоснимка, но не где-либо еще. Чтобы создать
фотография с правильным масштабом, которую можно точно измерить, орфографическая проекция
необходимо, при котором вид направлен прямо вниз на каждую точку фотографии.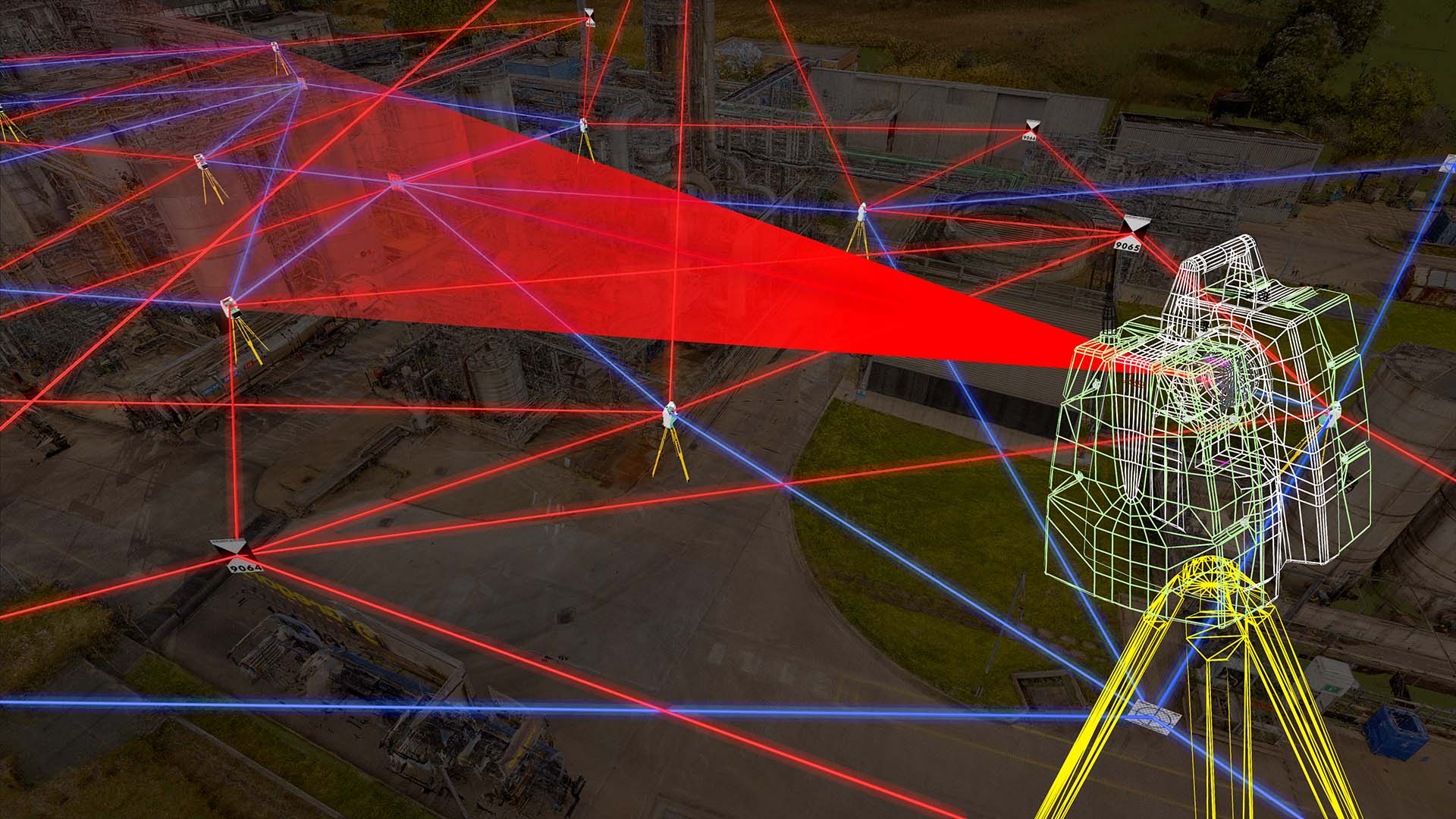
Процедура, используемая для создания цифровых ортофотографий, называемая орто-
исправления, требует аэрофотосъемки и соответствующей цифровой модели местности TIN, поскольку
входы. Поверхность TIN используется для ортогонального исправления файла отсканированного растрового изображения.
Комбинируя TIN и растровое изображение, каждому пикселю изображения присваивается известное местоположение.
и значение интенсивности. В процессе ректификации значение интенсивности для каждого пикселя равно
повторная выборка с использованием уравнения пространственной обратной засечки, таким образом удаляя смещения изображения
из-за проекции центральной перспективы, наклона камеры и рельефа местности.
Затем отдельные фотографии обрезаются и плавно соединяются друг с другом.
всю изучаемую территорию. В результате получается цифровое изображение, которое объединяет изображение
характеристики фотографии с геометрическими качествами карты – верный
масштабная фотографическая карта. Результирующее разрешение земли/пикселя может быть лучше
чем 1 фут. Однако точность окончательного цифрового ортофотоснимка зависит
в значительной степени зависит от плотности точек модели местности TIN.
Результирующее разрешение земли/пикселя может быть лучше
чем 1 фут. Однако точность окончательного цифрового ортофотоснимка зависит
в значительной степени зависит от плотности точек модели местности TIN.
Цифровые ортофотопланы широко используются в среде ГИС. Некоторый Преимущества ортофотографии включают следующее:
Может использоваться в качестве базовой карты ГИС для различных целей, включая городское и региональное планирование, пересмотр цифровых линейных графиков и топографических карт, создание почвенных карт и изучение дренажа
Более экономичный и отображает больше характеристик поверхности, чем обычные карты
Доступен через Интернет в геологической службе США. Обзор (USGS) или Информационная система природных ресурсов Техаса (TNRIS)
Цифровые ортофотографии, доступные в USGS и TNRIS, привязаны
к North American Datum (NAD) 1983 в универсальной поперечной проекции Меркатора. Каждое цифровое изображение покрывает ту же площадь, что и 7,5-минутный четырехугольный топограф USGS.
карта, но разделена на четыре части. Следовательно, конечный продукт называется цифровым.
четверть четырехугольника ортофотографии (DOQQ).
Каждое цифровое изображение покрывает ту же площадь, что и 7,5-минутный четырехугольный топограф USGS.
карта, но разделена на четыре части. Следовательно, конечный продукт называется цифровым.
четверть четырехугольника ортофотографии (DOQQ).
До этого момента в документе обсуждение было сосредоточено на разработка цифровых моделей местности и цифровых ортофотографий с помощью фотограмметрии. В следующем разделе приложение этих цифровых данных к моему исследованию поймы ГИС. отображение подробное.
Рис. 4. Уоллер-Крик в Остине, штат Техас
 В моем исследовании делается попытка связать выходные данные гидравлического моделирования с ГИС.
ArcView GIS используется в качестве компьютерной среды для картирования поймы.
участка Уоллер-Крик (рис. 4). Благодаря близости к многочисленным школам
зданий, домов и предприятий, расположение поймы Уоллер-Крик имеет большое значение.
интерес для градостроителей и инженеров-гидротехников.
В моем исследовании делается попытка связать выходные данные гидравлического моделирования с ГИС.
ArcView GIS используется в качестве компьютерной среды для картирования поймы.
участка Уоллер-Крик (рис. 4). Благодаря близости к многочисленным школам
зданий, домов и предприятий, расположение поймы Уоллер-Крик имеет большое значение.
интерес для градостроителей и инженеров-гидротехников.В рамках исследования цифровые ортофотографии использовались в качестве базовая карта для двумерного картографирования поймы и цифровая модель местности TIN. разработан, чтобы помочь в трехмерной визуализации поймы.
Двумерное картографирование поймы
Перед созданием карты поймы в ГИС выходные данные для
поток интереса должен быть сначала извлечен из гидравлической модели и импортирован в
АркВью. По завершении этого начального шага необходимо связать смоделированное
поток с таким же потоком в цифровой форме. Существует два основных способа получения цифрового
представление потока:
Существует два основных способа получения цифрового
представление потока:
- Доступ к файлам. Reach файлы представляют собой серию национальных гидрологические базы данных, которые однозначно идентифицируют и связывают между собой сегменты потока или «участки», составляющие дренажную систему поверхностных вод страны. Базы данных включать такую информацию, как уникальные коды охвата для каждого сегмента потока, восходящий/ нисходящие отношения и имена потоков (где это возможно). Последний выпуск, Файл 3 (RF3) состоит из атрибутированного цифрового линейного графика в масштабе 1:100 000. гидрография. Данные можно загрузить с сайта Управления по охране окружающей среды США. Веб-сайт Агентства (EPA) по адресу http://www.epa.gov/OST/BASINS/gisdata.html.
- Оцифровка потока . Используя цифровую ортофотографию в качестве базовой карты, поток можно оцифровать с помощью инструментов в ArcView. Цифровые ортофотографии для штата Техас доступны бесплатно (30-метровые, 10-метровые и 2,5-метровые резолюция) с веб-сайта TNRIS по адресу http://www.
 tnris.state.tx.us/gispage.html.
tnris.state.tx.us/gispage.html.Оба цифровых источника данных были оценены для исследования. Однако, Было обнаружено, что цифровые ортофотоснимки обеспечивают более точное пространственное представление Уоллер-Крик, чем RF3. Эта решимость не стала большой неожиданностью; Гидрография RF3 была разработана путем оцифровки водоемов с топографических карт. этому могут быть десятилетия, тогда как полеты для разработки цифрового TNRIS ортофотографии были выполнены в 1995. Таким образом, ортофотоснимок с разрешением 1 метр для USGS Остин-Ист 7,5-минутный четырехугольник был получен из TNRIS. В ArcView, изображение юго-запада DOQQ использовалось в качестве базовой карты для оцифровки Уоллера. Крик (рис. 5).
В рамках процесса картографирования некоторые ключевые точки вдоль Уоллер-Крик
также были оцифрованы. Эти точки определяют используемые границы восходящего и нисходящего потоков.
для гидравлического моделирования и определения промежуточных водотоков, соответствующих точкам
важных поперечных сечений, таких как мосты или водопропускные трубы. Часто этих точек было больше.
легко определить по сравнению с местоположением существующей структуры (например, дороги,
мост и др.). Таким образом, тема дорог на базовой карте использовалась в дополнение к цифровому изображению.
ортофото, чтобы помочь в процессе выбора точек.
Часто этих точек было больше.
легко определить по сравнению с местоположением существующей структуры (например, дороги,
мост и др.). Таким образом, тема дорог на базовой карте использовалась в дополнение к цифровому изображению.
ортофото, чтобы помочь в процессе выбора точек.
Рисунок 5. Картирование ручья с использованием цифровой базовой карты ортофотографии
После картирования поймы инструменты масштабирования в ArcView позволяют инженер-гидротехник, чтобы легко сравнить расположение поймы с местами объектов, представляющих интерес, таких как здания и дороги (рис. 6). цифровой Базовая карта ортофотоплана позволяет рассмотреть ландшафт, окружающий пойму как это выглядит на самом деле, создавая гораздо лучший фон, чем можно было бы ожидать от отсканированная бумажная карта.
Рис. 6. Картирование поймы с помощью базовой карты цифрового ортофотографии.
Трехмерная визуализация поймы
Карта поймы, показанная на рис. 6, достаточно подробна, чтобы ее можно было использовать
для измерения протяженности поймы. Но данные, описывающие глубину поймы, также
быть полезным. Этот тип анализа требует трехмерной визуализации поймы.
Для трехмерной визуализации поймы решающее значение имеет точная модель местности TIN.
Лучший TIN будет включать в себя как можно больше входных данных о высоте. Обеспечить региональное
высот местности, 30-метровая ЦМР была загружена с сайта ТНРИС. Данные о высоте
из гидравлической модели был использован для описания русла и поймы Уоллер-Крик.
Построение интегрированного TIN местности из этих данных требует сочетания
данные высоты гидравлической модели высокого разрешения с данными ЦМР сравнительно низкого разрешения.
Эта задача усложняется тем, что два типа данных имеют разную структуру:
данные DEM относятся к растровой области, а потоковые данные состоят из векторных объектов.
6, достаточно подробна, чтобы ее можно было использовать
для измерения протяженности поймы. Но данные, описывающие глубину поймы, также
быть полезным. Этот тип анализа требует трехмерной визуализации поймы.
Для трехмерной визуализации поймы решающее значение имеет точная модель местности TIN.
Лучший TIN будет включать в себя как можно больше входных данных о высоте. Обеспечить региональное
высот местности, 30-метровая ЦМР была загружена с сайта ТНРИС. Данные о высоте
из гидравлической модели был использован для описания русла и поймы Уоллер-Крик.
Построение интегрированного TIN местности из этих данных требует сочетания
данные высоты гидравлической модели высокого разрешения с данными ЦМР сравнительно низкого разрешения.
Эта задача усложняется тем, что два типа данных имеют разную структуру:
данные DEM относятся к растровой области, а потоковые данные состоят из векторных объектов.
Векторные объекты в ГИС включают три типа элементов: точки, линии,
и полигоны. Точка определяется одним набором декартовых координат (x, y). Линия
определяется строкой точек, в которой начальная и конечная точки называются узлами,
а промежуточные точки называются вершинами (Smith, 1995). Прямая состоит из двух
узлы и не вершины, тогда как кривая линия состоит из двух узлов и различного количества
вершины. Три или более линий, которые пересекаются, образуя замкнутую область, определяют многоугольник.
Представление векторных объектов обычно используется для моделирования линейных объектов (дороги, озера,
др.), картографические базовые карты и моделирование нестационарных процессов.
Точка определяется одним набором декартовых координат (x, y). Линия
определяется строкой точек, в которой начальная и конечная точки называются узлами,
а промежуточные точки называются вершинами (Smith, 1995). Прямая состоит из двух
узлы и не вершины, тогда как кривая линия состоит из двух узлов и различного количества
вершины. Три или более линий, которые пересекаются, образуя замкнутую область, определяют многоугольник.
Представление векторных объектов обычно используется для моделирования линейных объектов (дороги, озера,
др.), картографические базовые карты и моделирование нестационарных процессов.
Векторные объекты, использованные для описания Уоллер-Крик, состояли из множества
линии поперечного сечения и три линии, представляющие осевую линию потока, а также левую и
правые берега. ЦМР использовалась для высот за пределами поймы. Объединив
векторные и растровые данные для формирования TIN, предполагаемый результат – непрерывный трехмерный
Поверхность ландшафта, содержащая дополнительные детали в руслах ручьев. Подход
показано на рис. 7.
Подход
показано на рис. 7.
Процедура включает следующие шаги:
- Используйте 30-метровую ЦМР для представления местности.
- Векторизация ЦМР для создания точечного покрытия высот местности.
- Построить ограничивающий многоугольник из конечных точек поперечного сечения.
- Удалите все точки ЦМР, попадающие в ограничивающий полигон.
- Создайте TIN, используя ЦМР и точки поперечного сечения в качестве узлов, а также поток центральную линию и береговые линии как жесткие линии перегиба.
- Сформулируйте алгоритм для сглаживания интерфейса между ЦМР и вектором данные о пойме.
С помощью этих шагов можно построить трехмерный TIN местности.
таким образом, чтобы данные о высоте поймы преобладали над данными ЦМР в пределах области, для которой
она выражена и в других местах преобладают возвышения ЦМР, с плавной зоной перехода. Как только модель местности будет завершена, довольно просто добавить паводковую воду в
поверхность местности, позволяющая визуализировать пойму.
Как только модель местности будет завершена, довольно просто добавить паводковую воду в
поверхность местности, позволяющая визуализировать пойму.
В настоящее время мое исследование стоит на шаге 6: сглаживание
интерфейс между источниками растровых и векторных данных. ИНН создан,
но переходная зона довольно неровная (рис. 8). На основании известных
различия между ЦМР и данными о высоте поймы, этот результат был
ожидал. Данные о высоте поймы представляют собой совокупность полевых исследований.
и оценки топографической карты за период 10-15 лет в 1970-х гг.
и 1980-е годы. ЦМР была сформирована из цифровой модели местности, которая использовалась для разработки
цифровые ортофотографии ТНРИС в 1995. Учитывая, что данные имеют разные
время сбора, методы и разрешение, неудивительно, что они
быть несовместимым. Однако разница высот до 25 футов между данными
источники наблюдались в некоторых точках, что указывает на ошибку в одном или обоих
наборы данных.
Рисунок 8. Предварительная трехмерная модель местности
В качестве попытки выявления ошибочных данных
был использован источник данных. В ноябре Совет по планированию столичных территорий
CAPCO) опубликовала данные о высотных отметках для города Остин и нескольких
окружающие уезды. Полученные данные о высоте были результатом большого
проект по фотограмметрии выполнялся с 19с 96 по 1998 год. Я получил данные CAPCO
для Waller Creek и создал TIN на основе этих отметок в ArcView в
попытка использовать его в качестве независимого источника данных для проверки точности
интегрированный ИНН. TIN CAPCO имел очень высокое разрешение с точками данных.
каждый фут в некоторых местах. Таким образом, он считался более точным, чем
мой ИНН. При сравнении этих двух показателей было обнаружено, что данные DEM завышены.
возвышения вне канала, тогда как векторные данные занижают их,
каждый примерно на 5-10 футов. К счастью, векторные данные высот
согласованы с результатами CAPCO в русле потока. Моя работа над следующим
пару месяцев потребуется ремонт рваной переходной зоны.
Моя работа над следующим
пару месяцев потребуется ремонт рваной переходной зоны.
После того, как поверхность TIN будет завершена, можно будет добавить дополнительные функции. быть добавлены, чтобы позволить поверхности более близко приблизиться к реальности. Эти объекты могут включать дороги и контуры зданий. ArcView GIS позволяет это данные для наложения на поверхность TIN для трехмерной визуализации.
Высота здания может быть измерена с помощью цифрового ортофотоснимок по длине тени. Для расчета требуется один известный высота здания (Эйвери, 1992):
Где: h n = высота здания n
L n = длина тени здания n
На рис. 9 показан уровень детализации, который можно получить,
построение подробной модели поверхности TIN. Вид показывает реку Колорадо на юг.
центра Остина. Рисунок был подготовлен с использованием данных дистанционного зондирования, собранных
для проекта фотограмметрии CAPCO.
Рисунок 9. Конечная цель модели поверхности.
Выводы
В целом фотограмметрия показала себя жизненно важной
источник информации для моего исследовательского проекта. На самом деле большая часть работы
не может быть выполнено без цифровых данных, полученных с помощью фотограмметрии.
методики, описанные в этой статье. Использовались данные цифровых ортофотопланов.
в качестве базовой карты в качестве фонового изображения, в качестве базовой карты для оцифровки Уоллера
Ручей и ключевые точки ручья, а также для оценки высоты здания. Цифровая местность
данные модели использовались в качестве входных данных для модели TIN, и для создания TIN CAPCO
используется для проверки моей работы по трехмерному моделированию местности. Как результат
этого проекта и курса, я завоевал большое уважение к
фотограмметристы и работа, которую они выполняют.
Ссылки
- Эйвери, Т.Е. и Г. Л. Берлин. 1992. Основы дистанционного зондирования. и интерпретация аэрофотоснимков, 5 th ed . Издательство Макмиллан Компания, Нью-Йорк, штат Нью-Йорк.
- Campell, J.B. 1996. Введение в дистанционное зондирование , 2 nd изд. Гилфорд Пресс, Нью-Йорк, штат Нью-Йорк.
- Лиллесанд, Т.М. и Р. В. Кифер. 1994. Дистанционное зондирование и изображение Интерпретация . John Wiley & Sons, Нью-Йорк, штат Нью-Йорк.
- Смит, P . Система разработки гидрологических данных . Департамент гражданского Инженерия, Техасский университет в Остине. 1995. Онлайн-отчет CRWR 95-1.
- Томпсон, М.М. 1966. Руководство по фотограмметрии, 3 rd ed . Американское общество фотограмметрии, Фолс-Черч, Вирджиния.
- Геологическая служба США. 1998 г. Интернет-сайт, http://www.usgs.gov/research/gis/title.

