
2. Фотограмметрия. Системы координат, применяемые в фотограмметрии
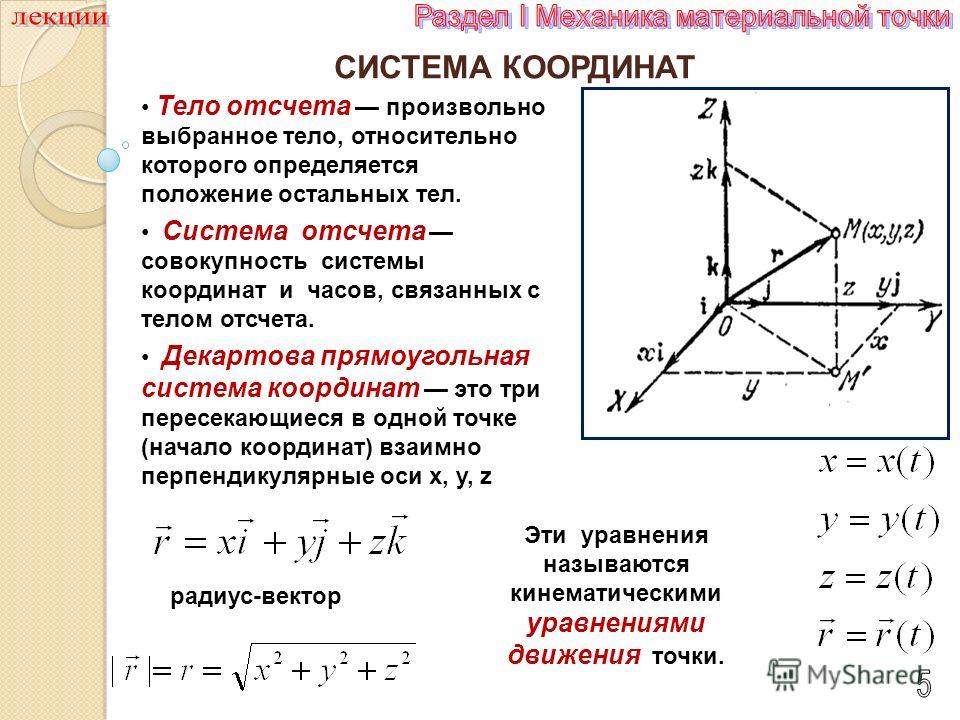
Фотограмметрия — техническая наука о методах определения формы, размеров и положения объектов по их фотографическим изображениям.
Для определения положения точки на снимке, применяют плоскую прямоугольную систему координат снимка о’ху. Начало координат находится в точке О -точке пересечения прямых, соединяющих координатные метки 1-2 и 3-4. Ось х совмещена с прямой 1-2.
Взаимное
положение точек местности определяют
в пространственной
фотограмметрической системе координат. Эта
система координат
правая. Начало координат и направления
координатных
осей выбирают произвольно. Началом
системы координат может
быть центр проекции S— SXYZ или какая-либо
точка местности М
— MXYZ. Плоскость XYустанавливают
параллельно плоскости
снимка или горизонтально (рис. 7,2).
7,2).
Положение точек местности определяют геодезической системе прямоугольных координат Гаусса —OГXГYГZГ. Начало геодезической системы координат находится в точке пересечения осевого меридиана данной зоны и экватора. Ось Уг направлена на восток, ось ХГ — на север (рис. 7.3). Условная геодезическая система координат может иметь началом любую точку местности, а ее оси сонаправлены соответствующим осям системы координат Гаусса (рис. 7.4).
Рис. 7.3. Геодезическая система координат
Рис. 7.4. Условная геодезическая система координат
Различают
элементы внутреннего и внешнего
ориентирования снимка.
Элементы внутреннего ориентирования определяют положение Центра проекции S относительно снимка. Ими являются координаты главной точки (xО, уО) в системе координат снимка и фокусное расстояние объектива АФА. Эти элементы почти всегда известны с высокой точностью и записаны в паспорте. Элементы внутреннего ориентирования формируют связку проектирующих лучей. Ее положение в пространстве определяют элементы внешнего ориентирования снимка. Элементы внешнего ориентирования модели местности определяют ее масштаб и положение в геодезическом пространстве.
Следует заметить, что для всех снимков, элементы внутреннего ориентирования можно считать постоянными известными величинами. Однако элементы внешнего ориентирования у каждого снимка свои и, как правило, неизвестны.
Элементы внешнего
ориентирования снимка можно определить
различными способами. Их делят на две
группы.
В первую группу входят способы определения элементов внешнего ориентирования снимков в полете с помощью специальных приборов. Например, координаты центров проекций находят по показаниям GPS-приемников, установленных на борту летательного аппарата. Угловые элементы внешнего ориентирования определяют с помощью инерциальных систем навигации.
Во вторую группу входят способы для определения элементов внешнего ориентирования снимков по опорным точкам.
Опорными точками называют точки с известными геодезическими координатами. Определение элементов внешнего ориентирования снимков с использованием опорных точек называют обратной фотограмметрической засечкой
или задачей по ориентированию снимка. Конечная
цель фотограмметрической обработки
снимков — преобразование их в заданную
картографическую проекцию местности.
В Российской Федерации, как известно,
такой проекцией
является проекция Гаусса—Крюгера. Преобразование снимков в проекцию
Гаусса—Крюгера требует выполнения
очень
громоздких вычислений. При крупномасштабном
картографировании
проекция Гаусса—Крюгера часто заменяется
близкой
к ней по геометрическим свойствам
ортогональной проекцией.
Преобразование снимков в проекцию
Гаусса—Крюгера требует выполнения
очень
громоздких вычислений. При крупномасштабном
картографировании
проекция Гаусса—Крюгера часто заменяется
близкой
к ней по геометрическим свойствам
ортогональной проекцией.
В фотограмметрии под трансформированием понимают преобразование аэро- или космических снимков, полученных в большинстве случаев в центральной проекции, в ортогональную или какую-либо иную картографическую проекцию.
Суть аналитического трансформирования заключается в преобразовании координат точек снимка в координаты соответствующих точек местности с использованием строгих математических зависимостей.
Фотограмметрия. Системы координат точек местности и снимка. Элементы ориентирования снимка. (Лекция 5)
Похожие презентации:
Регионы Российской Федерации
Демографическая проблема
Страны мира. Италия. (2 класс)
Геофизические исследования скважин
Страна Италия
Моя родина Кыргызстан
Проект по географии «Развитие Дальнего Востока в 21 веке» (9 класс)
Магнитные аномалии
Игра-викторина «Путешествие по Беларуси»
Создание национального парка в Танзании
1.
 Лекция №5Геометрические свойства одиночного
Лекция №5Геометрические свойства одиночногоснимка
Системы координат. Элементы
ориентирования снимка.
2. СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА
Для установления связей между точками объекта и ихфотографическими
изображениями
используются
пространственные и плоские системы координат.
Если картографируемый участок захватывает больше, чем 1
зону может использоваться геоцентрическая система
координат (рис.22). В ней за начало координат принят центр
общеземного эллипсоида О’г, а плоскостью X’г Y’г является
плоскость экватора. Ось X’г находится в плоскости начального
меридиана, а ось Z’г совмещена с полярной осью О’г Р.
Система координат правая. За фигуру Земли принимается
эллипсоид вращения с полуосями а и b и сжатием е. Любая
точка О пространства задаётся геодезическими координатами:
широтой В, долготой L и высотой Н. Геоцентрические
координаты X’г, Y’г, Z’г точки О находят по их геодезическим
координатам, с помощью известных формул сфероидической
геодезии.

3. СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА
Рис.224. СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА
Может использоваться и прямоугольная система координатX”г Y”г Z”г, представленная на рис.22.
Она сохраняет все преимущества геоцентрической системы,
но абсолютные значения координат точек в ней меньше.
Ось Z”г нормальна к поверхности эллипсоида в начальной
точке О картографируемого участка; ось Y”г совпадает с
направлением на север.
Система координат правая. За начало счёта высот
принимается такое значение, при котором аппликаты всех точек
положительны.
Координаты X”г, Y”г, Z”г, легко получаются из
геоцентрических X’г, Y’г, Z’г путём трёхмерного преобразования,
включающего перенос начала координат и их вращение.
5. СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА
При решении задач на сравнительно небольшом участке местностииспользуется известная левая система прямоугольных координат Oг Xг Yг Zг
(рис.23) Гаусса
Рис.
 23
236. СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА
На практике часто находит применение местная системапространственных прямоугольных координат Xг Yг Zг с началом
в некоторой точке А картографируемого участка (рис.23). В
этой системе ось Zг нормальна к поверхности квазигеоида в
точке А, ось Xг горизонтальна и параллельна осевому
меридиану зоны, в которой находится участок съёмки, а ось Yг
направлена на восток. Координаты начала задаются в системе
Ог Xг Yг Zг.
Системы координат Ог Xг Yг Zг и А Xг Yг Zг в фотограмметрии
принято называть геодезическими.
Координаты точек местности, полученные по результатам
измерения снимков, определяются, как правило, в так
называемой
фотограмметрической
пространственной
прямоугольной системе координат SXYZ (рис.23).
7. СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА
Она правая. Ее начало и направление координатных осейвыбираются так, чтобы наиболее просто осуществлялся
переход от координат точек снимка к координатам точек
местности.
 Обычно начало координат совмещается с точкой
Обычно начало координат совмещается с точкойфотографирования S или с какой-либо точкой местности, а
плоскость XY устанавливается горизонтально или параллельно
плоскости одного из снимков.
Поскольку системы координат X Y Z и Xг Yг Zг не совпадают, то
при переходе от фотограмметрических координат к
геодезическим
необходимо
выполнять
преобразование
координат из системы в систему.
8. СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА
На каждом снимке по его периметру имеется рядкоординатных
меток,
которые
определяют
плоскую
прямоугольную систему координат o’ x y. Такая система при
наличии на снимке четырёх меток 1, 2, 3, 4 показана на рис. 24.
Начало координат находится в точке о’ пересечение отрезков 12 и 3-4. Ось x совмещается с прямой 1-2, а ось y с
перпендикуляром к оси x в точке о’.
Возможны и другие варианты. Например, ось y – это главная
вертикаль, а ось x – одна из горизонталей и т. д. Отметим, что
на наземных снимках оси обозначают буквами x и z, а
координаты в системе координат снимка иногда называют
фотокоординатами.

9. СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА
Положение точка на снимке определяется координатами x и y,но
это
можно
сделать
и
в
пространственной
фотограмметрической системе X’Y’Z’ (рис.25).
Начало координат этой системы всегда совмещено с точкой
фотографирования S, а оси X’, Y’, Z’ параллельны осям X, Y, Z
фотограмметрической системы координат точек объекта
местности или осям геодезической системы координат.
Связи между плоскими и пространственными координатами
точек снимка и местности устанавливаются через элементы
ориентирования снимка.
10. СИСТЕМЫ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА
Рис.24. Плоская прямоугольнаясистема координат снимка
Рис.25. Пространственная система
координат точки снимка
11. ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СНИМКА
Элементами ориентирования снимка называются величины,определяющие его положение в момент фотографирования
относительно выбранной пространственной прямоугольной
системы координат.
 Различают элементы внутреннего и внешнего
Различают элементы внутреннего и внешнегоориентирования снимка.
Элементы внутреннего ориентирования позволяют найти
положение центра проекции относительно снимка, а значит
восстановить связку проектирующих лучей, существовавшую в
момент фотографирования. К ним относятся координаты главной
точки x0, y0 снимка и фокусное расстояние f фотокамеры (рис.26).
12. ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СНИМКА
13. ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СНИМКА
Элементы внешнего ориентирования (ЭВО) позволяютустановить положение снимка (связки), которое она занимала в
момент
фотографирования
относительно
заданной
пространственной прямоугольной системы координат. Для
снимков, полученных АФА, на практике используют две таких
системы.
В первую систему ЭВО (рис. 27) входят координаты Xs, Ys, Zs
точки фотографирования, а также углы поворота снимка α, ω и κ
Продольный угол наклона снимка α образуется осью Z΄ и
проекцией главного луча Sо на плоскость X΄ Z΄.

Поперечный угол наклона снимка ω заключён между главным
лучом Sо и его проекцией на плоскость X΄ Z΄.
Угол поворота снимка κ образуют ось у снимка и след плоскости,
проходящей через главный луч Sо и ось Y΄ (в этой плоскости
находится угол ω).
На рис. 27 углы κ и ω положительные, угол α – отрицательный.
Вторая система (рис.28) ЭВО содержит:
координаты Xs, Ys, Zs точки фотографирования;
t – дирекционный угол оптической оси фотокамеры – он
образуется следом плоскости главного вертикала W и
положительным направлением оси X΄;
ε – угол наклона снимка, находится в плоскости главного
вертикала между главным и надирным лучами;
κ – угол поворота в плоскости снимка, образуется главной
вертикалью и осью y плоской системы координат x y.
На рисунке изображены положительные углы. Таким образом,
положение одиночного снимка определяется девятью элементами
ориентирования, из них три – элементы внутреннего
ориентирования и шесть – элементы внешнего ориентирования.
15. ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СНИМКА
English Русский Правила
фотограмметрия – Не удалось найти систему координат NRW Netz zone 2 в Metashape
У меня есть данные фотограмметрии из Германии, я получил информацию о системе координат, используемой в этом проекте для Ground Control Point (GCP), NRW Netz77 zone 2. Я не смог ничего не нашел на epsg.io или spacereference.org.
Пытаюсь установить систему координат в Agisoft Metashape. Кто-нибудь знает об этой системе координат и о том, как установить ее в Metashape?
Здесь я прикрепил изображение с контроллера GPS.
- система координат
- фотограмметрия
2
Это не полный ответ. Я нашел версию определения на сайте geotrafo e.U. Скачанный файл для Netz77-NRW GK2.gtp выглядит так:
geotrafo_parameter_v46 Netz77-NRW_GK2 -566,1 -116,3 -390,1 1.11 0,24 -3,76 0,9999874 Бессель 1841 г.Гаусс/Крюгер 6 2500000 0 0 0 0 1
 Гаусс/Крюгер
6
2500000
0
0
0
0
1
Гаусс/Крюгер
6
2500000
0
0
0
0
1
Первые 7 параметров предназначены либо для системы координат, либо для преобразования вектора положения между DHDN и WGS84/ETRS89./ITRFxx. При проверке других преобразований DHDN/WGS84 параметры однозначно определены как ОТ WGS84/ETRS89/ITRFxx В DHDN, но метод не ясен. Я могу найти преобразование с аналогичными значениями, которое использует систему координат, но обычно европейские страны используют вектор положения. Единственная разница между двумя методами заключается в знаках параметров вращения (№ 4, 5, 6).
“Bessel 1841” используется для DHDN.
Проекция представляет собой зону Гаусса-Крюгера 2, поэтому
6 = центральный меридиан/долгота начала координат 2500000 = ложный восток 0 = (предположительно) ложный север 0 = (предполагаемая широта происхождения 0 = (не знаю) 0 = (не знаю) 1 = масштабный коэффициент
Эти 7 параметров могут использоваться для проекций, которые принимают разное количество параметров.
1
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Системы координат для WingtraOne PPK
Рекомендуемая система координат
Крайне важно знать местоположение базы в основанной на ITRF глобальной системе координат, ориентированной на Землю и привязанной к Земле (ECEF). Координаты могут быть представлены в декартовых координатах (X, Y, Z) или геодезических координатах (широта, долгота, h). В последнем случае важно, чтобы высоты были эллипсоидальными.
Мы рекомендуем использовать WGS84, но другие системы координат, такие как ETRFXX/ETRSXX, NAD83 (эллипсоидальная) или другие системы, основанные на ITRF, также работают. Важно, чтобы реализация системы координат основывалась на современной (не старше 2000 года) системе отсчета. Для эталона высоты обычными эллипсоидами являются WGS84 или GRS80.
- WGS84 (EPSG: 4326) с эллипсоидальной высотой
- NAD83 (EPSG: 6318) с эллипсоидальной высотой
- ETRF (EPSG: 9059) с эллипсоидальной высотой
- CHTRF95 (EPSG: 4151) с эллипсоидальной высотой
- Другое на основе ITRF, изготовленное по индивидуальному заказу с эллипсоидальной высотой
В зависимости от вашего региона и наличия инструментов преобразования может быть лучше использовать локальные системы отсчета, чтобы избежать ненужных преобразований координат в программном обеспечении для фотограмметрии.
Значение выбранной системы координат
Система координат базовой станции определяет систему координат изображений полета после обработки PPK. Как вы видите на рисунке ниже, система координат изображения всегда совпадает с системой координат базовой станции.
Рабочий процесс глобальной системы координат ECEF
Для обработки по умолчанию система координат изображения (которая всегда является системой координат базовой станции) должна быть выбрана в качестве входной системы координат при постобработке полетных изображений в любом стороннем программном обеспечении.